【要約】 被駆動部材であるブーム、アーム及びバケットを連結して構成された多関節型のフロント作業機、操作信号に基づいて複数の被駆動部材をそれぞれ駆動する油圧アクチュエータであるブームシリンダ、アームシリンダ及びバケットシリンダ、複数の油圧アクチュエータのうち操作者の所望する油圧アクチュエータに操作信号を出力する複数の操作部材、及び、フロント作業機による作業対象に対して予め設定された目標面上およびその上方の領域内でフロント作業機が動くように、複数の油圧アクチュエータのうち少なくとも1つに操作信号を出力するか、又は出力された操作信号を補正する領域制限制御を実行するとともに、領域制限制御を行う油圧アクチュエータの前記領域制限制御を行う直前の動作に係る情報に基づいて操作信号を補正する制御装置を備える。これにより、マシンコントロールにおける掘削施工の精度を向上することができる。
特許-権利維持
16%
出願番号JP2021508564A
出願日2019-03-27
公開番号JPWO2020194620
公開日2021-09-13
登録番号JP7096425B
登録発行日2022-07-05
被引用件数 (JP・US) 0
引用件数 6
早期審査 (JP) 0
出願人日立建機
発明者武内 弘樹 , 泉 枝穂
代理人/特許事務所特許業務法人開知国際特許事務所
【発明の詳細な説明】
【技術分野】
【0001】本発明は、作業機械に関する。【背景技術】
【0002】建設機械等の作業機械では、オペレータがブームやアームなどで構成されるフロント作業機を、それぞれの操作レバーで操作を行なっているが、これらフロント作業機を複合操作して所定の領域をある程度の精度で掘削することは、操作に不慣れなオペレータにとっては非常に困難である。そこで、近年、作業機械では、外部または内部から設計面情報を取得した上で作業機械のバケットの位置検出を行ない、検出された作業機械のバケット位置に基づき、例えば、目標としている面よりも下方を掘削しないようにフロント作業機を半自動制御する施工手法(マシンコントロール)が知られている。【0003】このようなマシンコントロールに関するものとして、例えば、特許文献1には、複数のフロント作業装置駆動用のアクチュエータに対応してそれぞれ設けられ、これら各アクチュエータの駆動をそれぞれ指令する複数の操作部材と、前記各操作部材の操作による駆動指令に応じて前記アクチュエータをそれぞれ駆動する駆動手段とを備えた建設機械において、前記フロント作業装置の作業目標面を設定する設定手段と、前記各操作部材の操作により前記フロント作業装置が前記作業目標面に接近する場合に、前記フロント作業装置の前記作業目標面への接近の度合いと動作方向に応じて、前記作業目標面に沿った動作となるような操作をオペレータに教示する操作教示手段とを備える建設機械が開示されている。【先行技術文献】
【0004】【特許文献1】
特開2007-009432号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】マシンコントロール機能を備えた油圧ショベルなどの作業機械においては、フロント作業機が半自動制御にて目標面に沿って掘削施工が行なわれる。しかしながら、フロント作業機が駆動し始める箇所においては、掘削施工の精度にばらつきが生じる場合がある。その一因としては、動作サイクルごとの駆動開始直前のシリンダ内部圧力の大きさの違いが挙げられる。すなわち、マシンコントロールにおける駆動開始直前のシリンダ内部圧力が動作サイクルごとに異なると、フロント作業機の駆動開始時の駆動速度の精度に差異が発生し、結果としてマシンコントロールにおける掘削施工の精度にばらつきが生じてしまう。【0006】本発明は上記に鑑みてなされたものであり、マシンコントロールにおける掘削施工の精度を向上することができる作業機械を提供することを目的とする。【課題を解決するための手段】
【0007】本願は上記課題を解決する手段を複数含んでいるが、その一例を挙げるならば、複数の被駆動部材を連結して構成された多関節型のフロント作業機と、操作信号に基づいて前記複数の被駆動部材をそれぞれ駆動する複数の油圧アクチュエータと、前記複数の油圧アクチュエータのうち操作者の所望する油圧アクチュエータに前記操作信号を出力する操作装置と、前記フロント作業機による作業対象に対して予め設定された目標面上およびその上方の領域内で前記フロント作業機が動くように、前記複数の油圧アクチュエータのうち少なくとも1つの油圧アクチュエータに前記操作信号を出力するか、又は出力された前記操作信号を補正する領域制限制御を実行する制御装置とを備えた作業機械において、前記制御装置は、前記領域制限制御を行う直前の前記油圧アクチュエータの前記領域制限制御を行う直前の動作に係る情報に基づいて前記操作信号を補正するものとする。【発明の効果】
【0008】本発明によれば、マシンコントロールにおける掘削施工の精度を向上することができる。【図面の簡単な説明】
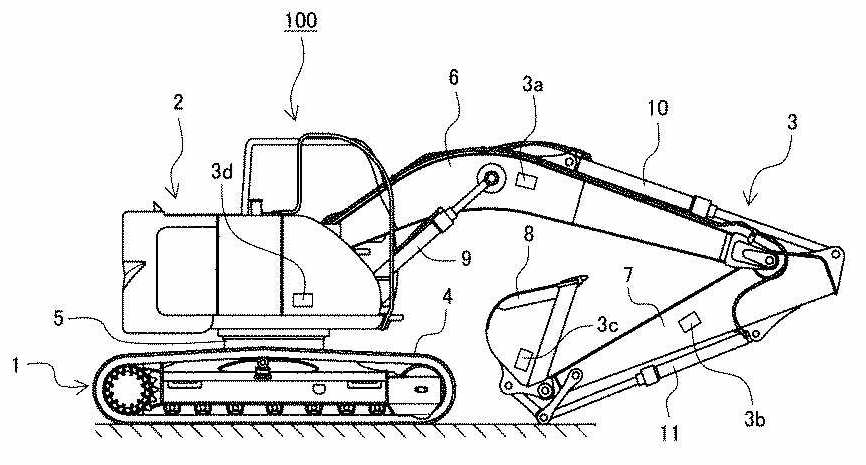
【0009】作業機械の一例である油圧ショベルの外観を模式的に示す側面図である。 油圧ショベルの駆動装置をその制御装置とともに示す図である。 図2における切替用油圧ユニットの詳細を示す図である。 図2におけるマシンコントロール用油圧ユニットの詳細を示す図である。 油圧ショベルにおける掘削施工の一例を示す図である。 油圧ショベルにおける掘削施工の一例を示す図である。 、駆動装置のうちアームシリンダの駆動に係る構成を抜き出して示す図である。 従来技術におけるアームクラウド時のバケットのツメ先の軌跡を示す図である。 掘削施工目標面上にてアームクラウド操作を入力したときの、アームクラウド操作圧、アームクラウド減圧指令圧、及びアームクラウド減圧弁後圧の波形を示す図である。 第1の実施の形態に係る制御装置の処理機能を示す機能ブロック図である。 第1の実施の形態に係るアームシリンダ速度補正処理を示すフローチャートである。 第1の実施の形態におけるアームクラウド時のバケットのツメ先の軌跡を比較例である従来技術の軌跡とともに示す図である。 第1の実施の形態の変形例に係るアームシリンダ速度補正処理を示すフローチャートである。 アームシリンダのボトム圧とロッド圧の差圧とアームシリンダ速度の比率との関係を予め定めた比率テーブルの一例を示す図である。 第2の実施の形態に係る駆動装置のうちアームシリンダの駆動に係る構成を抜き出して示す図である。 第2の実施の形態に係る制御装置の処理機能を示す機能ブロック図である。 第2の実施の形態に係るアームシリンダ速度補正処理を示すフローチャートである。 第2の実施の形態の変形例に係るアームシリンダ速度補正処理を示すフローチャートである。 アームダンプ操作量とアームシリンダ速度の比率との関係を予め定めた比率テーブルの一例を示す図である。 第3の実施の形態に係るアームシリンダのストローク長とアームダンプ減圧指令圧との関係を予め定めた指令圧算出テーブルの一例を示す図である。【発明を実施するための形態】
【0010】以下、本発明の実施の形態を図面を参照しつつ説明する。なお、本実施の形態では、作業機械の一例として、作業フロントを備える油圧ショベルを例示して説明するが、同様の作業フロントを備える作業機械であれば、ホイールローダのような油圧ショベル以外の作業機械にも本発明を適用することが可能である。【0011】<第1の実施の形態>
本発明の第1の実施の形態を図1~図12を参照しつつ説明する。【0012】図1は、本実施の形態に係る作業機械の一例である油圧ショベルの外観を模式的に示す側面図である。また、図2~図4は、油圧ショベルの駆動装置をその制御装置とともに示す図であり、図3は図2における切替用油圧ユニットの詳細を、図4は図2におけるマシンコントロール用油圧ユニットの詳細をそれぞれ示す図である。【0013】図1において、油圧ショベル100は、下部走行体1と、この下部走行体1の上部に配置される上部旋回体2と、この上部旋回体2に接続されているフロント作業機3から概略構成されている。【0014】下部走行体1は、左右の走行履帯4を有し、この左右の走行履帯4は図示しない走行油圧モータにより駆動する。【0015】上部旋回体2は、下部走行体1に旋回装置5を介して連結されており、この旋回装置5が図示しない旋回油圧モータにより駆動されて、上部旋回体2を下部走行体1に対して水平方向に旋回させることができる。【0016】フロント作業機3は、土砂の掘削(掘削施工)などの作業を行うためのものであり、上部旋回体2に俯仰動作可能に設けられたブーム6と、ブーム6の先端に上下方向に回動可能に設けられたアーム7と、アーム7の先端に回動可能に連結されたフロントアタッチメントとしてのバケット8とから構成されている。また、フロント作業機3には、ブーム6を俯仰動作可能に駆動するブームシリンダ9、アーム7を上下方向に回動可能に駆動するアームシリンダ10、バケット8を回動可能に駆動するバケットシリンダ11が設けられており、ブームシリンダ9、アームシリンダ10、バケットシリンダ11のシリンダロッドがそれぞれ伸縮することでフロント作業機3が動作し、土砂の掘削などの作業を可能にする。【0017】図2に示すように、油圧ショベル100の駆動装置においては、可変容量型ポンプ21および固定容量型パイロットポンプ22が、原動機23によって駆動される。【0018】可変容量型ポンプ21は、ブームシリンダ9、アームシリンダ10、バケットシリンダ11、旋回用モータ12などの油圧アクチュエータを駆動するための駆動源となる。なお、図2では可変容量型ポンプ21は1個のみ表記しているが、複数個あってもよい。【0019】固定容量型パイロットポンプ22は、ブーム用流量制御弁48、アーム用流量制御弁49、バケット用流量制御弁50、旋回用流量制御弁51などの制御弁を駆動させるための駆動源となる。【0020】可変容量型ポンプ21から吐出された作動油は、それぞれ、ブーム用流量制御弁48、アーム用流量制御弁49、バケット用流量制御弁50、旋回用流量制御弁51、などを経由して、それぞれ、ブームシリンダ9、アームシリンダ10、バケットシリンダ11、旋回用モータ12、などの油圧アクチュエータ(以降、油圧アクチュエータ9~12と称することがある)に供給される。【0021】油圧アクチュエータ9~12に供給された作動油は、ブーム用流量制御弁48、アーム用流量制御弁49、バケット用流量制御弁50、旋回用流量制御弁51などを経由して、タンク24に排出される。なお、図2では図示しないが、同様の方法で、走行用モータやブレード、アタッチメント関係の油圧アクチュエータも駆動可能である。【0022】固定容量型パイロットポンプ22は、ロック弁25に接続されている。運転者により、運転室に設けられるロックレバーなどの操作によってロック弁25を通流状態に切り換えなければ、固定容量型パイロットポンプ22から吐出される作動油はロック弁25の下流側には流れないようになっている。【0023】ロック弁25は、ブーム上げ用パイロット圧制御弁31、ブーム下げ用パイロット圧制御弁32、アームクラウド用パイロット圧制御弁33、アームダンプ用パイロット圧制御弁34、バケットクラウド用パイロット圧制御弁35、バケットダンプ用パイロット圧制御弁36、旋回右回転用パイロット圧制御弁37、旋回左回転用パイロット圧制御弁38、図示しない右走行用パイロット圧制御弁および左走行用パイロット圧制御弁などに接続されている。【0024】ブーム上げ用パイロット圧制御弁31およびブーム下げ用パイロット圧制御弁32は、ブーム用操作部材27により開閉することが可能である。アームクラウド用パイロット圧制御弁33およびアームダンプ用パイロット圧制御弁34は、アーム用操作部材28により開閉することが可能である。バケットクラウド用パイロット圧制御弁35およびバケットダンプ用パイロット圧制御弁36は、バケット用操作部材29により開閉することが可能である。旋回右回転用パイロット圧制御弁37および旋回左回転用パイロット圧制御弁38は、旋回用操作部材30により開閉することが可能である。【0025】ブーム上げ用パイロット圧制御弁31、ブーム下げ用パイロット圧制御弁32、アームクラウド用パイロット圧制御弁33、アームダンプ用パイロット圧制御弁34、バケットクラウド用パイロット圧制御弁35、バケットダンプ用パイロット圧制御弁36、旋回右回転用パイロット圧制御弁37、旋回左回転用パイロット圧制御弁38の下流側には、シャトルブロック39が接続されている。各パイロット圧制御弁31~38から排出される作動油は、シャトルブロック39に一旦導入される。シャトルブロック39の下流側には、ブーム上げ用パイロット配管40、ブーム下げ用パイロット配管41、アームクラウド用パイロット配管42、アームダンプ用パイロット配管43、バケットクラウド用パイロット配管44、バケットダンプ用パイロット配管45、旋回右回転用パイロット配管46、旋回左回転用パイロット配管47などが接続されている。【0026】ブーム上げ用パイロット配管40およびブーム下げ用パイロット配管41の下流側には、ブーム用流量制御弁48が接続されている。アームクラウド用パイロット配管42およびアームダンプ用パイロット配管43の下流側には、アーム用流量制御弁49が接続されている。バケットクラウド用パイロット配管44およびバケットダンプ用パイロット配管45の下流側には、バケット用流量制御弁50が接続されている。旋回右回転用パイロット配管46および旋回左回転用パイロット配管47の下流側には、旋回用流量制御弁51が接続されている。【0027】シャトルブロック39の下流側には、可変容量型ポンプ21に取り付けられているレギュレータ26も接続されている。レギュレータ26は、各操作部材(ブーム用操作部材27、アーム用操作部材28、バケット用操作部材29、旋回用操作部材30)の操作量に応じて、可変容量型ポンプ21の傾転を変化させ、吐出流量を調整する機能を備えている。すなわち、シャトルブロック39は、各パイロット圧制御弁31~38からの操作信号圧力に基づいて、レギュレータ26へ供給されるための信号圧力を生成する役割を持つ。【0028】各流量制御弁(ブーム用流量制御弁48、アーム用流量制御弁49、バケット用流量制御弁50、旋回用流量制御弁51)は、各操作部材(ブーム用操作部材27、アーム用操作部材28、バケット用操作部材29、旋回用操作部材30)の操作量に応じて、切換量を調整できるようになっている。【0029】また、油圧ショベル100の駆動装置においては、制御装置67、シャトル弁114、切替用油圧ユニットA1、およびマシンコントロール用油圧ユニットA2が備えられている。【0030】制御装置67で各フロントの位置情報を受信し、その信号を基に、マシンコントロールを可能とする適切なパイロット圧力となるように、切替用油圧ユニットA1及びマシンコントロール用油圧ユニットA2に指令信号を送信して制御している。【0031】図3に示すように、切替用油圧ユニットA1には、切替弁501、切替弁502、切替弁503、切替弁504、切替弁505が配置されている。切替弁501~505は、消磁(非通電)時には中立位置にあり、励磁(通電)時にその開度を切り替える。【0032】マシンコントロールを実施しない場合は、制御装置67からは指令信号601~605が出力されず、切替弁501~505は中立位置に保持される。このとき、ブーム下げ用パイロット圧制御弁32からの作動油は、パイロット配管202を通過後、切替用油圧ユニットA1内部のパイロット配管212、パイロット配管222、切替用油圧ユニットA1外部のパイロット配管232を経由し、シャトルブロック39に到達する。また、アームクラウド用パイロット圧制御弁33からの作動油は、パイロット配管203を通過後、切替用油圧ユニットA1内部のパイロット配管213、パイロット配管223、切替用油圧ユニットA1外部のパイロット配管233を経由し、シャトルブロック39に到達する。また、アームダンプ用パイロット圧制御弁34からの作動油は、パイロット配管204を通過後、切替用油圧ユニットA1内部のパイロット配管214.パイロット配管224、切替用油圧ユニットA1外部のパイロット配管234を経由し、シャトルブロック39に到達する。また、バケットクラウド用パイロット圧制御弁35からの作動油は、パイロット配管205を通過後、切替用油圧ユニットA1内部のパイロット配管215、パイロット配管225、切替用油圧ユニットA1外部のパイロット配管235を経由し、シャトルブロック39に到達する。また、バケットダンプ用パイロット圧制御弁36からの作動油は、パイロット配管206を通過後、切替用油圧ユニットA1内部のパイロット配管216、パイロット配管226、切替用油圧ユニットA1外部のパイロット配管236を経由し、シャトルブロック39に到達する。すなわち、マシンコントロールを実施しない場合は、油圧ショベル100の駆動装置は、作動油がマシンコントロール用油圧ユニットA2を経由しない回路となる。【0033】マシンコントロールを実施する場合は、制御装置67から指令信号601~605を出力することで、切替弁501~505の開度を切り替える。このとき、ブーム下げ用パイロット圧制御弁32からの作動油は、パイロット配管202を通過後、切替用油圧ユニットA1内部のパイロット配管212、パイロット配管242を経由し、マシンコントロール用油圧ユニットA2に流入する。マシンコントロール用油圧ユニットA2に流入した後は、切替用油圧ユニットA1内部のパイロット配管252、パイロット配管222、切替用油圧ユニットA1外部のパイロット配管232を経由し、シャトルブロック39に到達する。また、アームクラウド用パイロット圧制御弁33からの作動油は、パイロット配管203を通過後、切替用油圧ユニットA1内部のパイロット配管213、パイロット配管243を経由し、マシンコントロール用油圧ユニットA2に流入する。マシンコントロール用油圧ユニットA2に流入した後は、切替用油圧ユニットA1内部のパイロット配管253、パイロット配管223、切替用油圧ユニットA1外部のパイロット配管233を経由し、シャトルブロック39に到達する。また、アームダンプ用パイロット圧制御弁34からの作動油は、パイロット配管204を通過後、切替用油圧ユニットA1内部のパイロット配管214、パイロット配管244を経由し、マシンコントロール用油圧ユニットA2に流入する。マシンコントロール用油圧ユニットA2に流入した後は、切替用油圧ユニットA1内部のパイロット配管254、パイロット配管224、切替用油圧ユニットA1外部のパイロット配管234を経由し、シャトルブロック39に到達する。また、バケットクラウド用パイロット圧制御弁35からの作動油は、パイロット配管205を通過後、切替用油圧ユニットA1内部のパイロット配管215、パイロット配管245を経由し、マシンコントロール用油圧ユニットA2に流入する。マシンコントロール用油圧ユニットA2に流入した後は、切替用油圧ユニットA1内部のパイロット配管255、パイロット配管225、切替用油圧ユニットA1外部のパイロット配管235を経由し、シャトルブロック39に到達する。また、バケットダンプ用パイロット圧制御弁36からの作動油は、パイロット配管206を通過後、切替用油圧ユニットA1内部のパイロット配管216、パイロット配管246を経由し、マシンコントロール用油圧ユニットA2に流入する。マシンコントロール用油圧ユニットA2に流入した後は、切替用油圧ユニットA1内部のパイロット配管256、パイロット配管226、切替用油圧ユニットA1外部のパイロット配管236を経由し、シャトルブロック39に到達する。すなわち、マシンコントロールを実施する場合は、油圧ショベル100の駆動装置は、作動油がマシンコントロール用油圧ユニットA2を経由する回路となるので、マシンコントロール用油圧ユニットA2の各比例電磁弁(後の図5参照)を制御することで、マシンコントロールを可能とする。【0034】図4に示すように、マシンコントロール用油圧ユニットA2には、電磁切替弁701が配置されている。電磁切替弁701は、消磁(非通電)時にはその開度はゼロ(全閉)であり、励磁(通電)時にその開度をオープンにする。マシンコントロールを実施する際に、制御装置67から出力された指令信号301を受けてその開度をオープンにし、マシンコントロールを実施しない際には、電磁切替弁701は消磁(非通電)となり、その開度をゼロ(全閉)とさせる。【0035】ブーム上げ用パイロット圧制御弁31の下流側には、上流側から、パイロット配管201、シャトル弁114、パイロット配管211が配置されている。【0036】シャトル弁114は高圧優先形のシャトル弁であり、2つの入口ポートと1つの出口ポートを有している。シャトル弁114の入口ポートの一方はパイロット配管201に接続され、出口ポートにパイロット配管211が接続されている。ブーム上げ用パイロット圧制御弁31に供給された作動油は、パイロット配管201、シャトル弁114を介して、パイロット配管211に供給される。【0037】シャトル弁114の入口ポートの他方には、上流側から、ロック弁25、パイロット配管207、電磁切替弁701、パイロット配管208、比例電磁弁707、パイロット配管277が配置されている。シャトル弁114の入口ポートの他方には、ブーム上げ用パイロット圧制御弁31を介さず固定容量型パイロットポンプ22から流入されるようになっている。すなわち、ブーム用操作部材27の操作量に依存せずパイロット配管211に作動油が供給される。【0038】比例電磁弁707は、マシンコントロール時に目標面下を掘削することのないように、ブーム上げを強制的に行わせるための弁である。比例電磁弁707は、消磁(非通電)時にはその開度はゼロ(全閉)であり、励磁(通電)時にその開度をオープンにする。励磁力を増加させるほどその開度が大きくなる。比例電磁弁707は、制御装置67から出力された指令信号307を受けてその開度を調整する。【0039】比例電磁弁702は、マシンコントロール時に目標面下を掘削することのないように、ブーム下げ速度を減速させるための弁である。比例電磁弁702は、消磁(非通電)時にはその開度は全開であり、励磁(通電)時にその開度をクローズにする。励磁力を増加させるほどその開度が小さくなる。比例電磁弁702は、制御装置67から出力された指令信号302を受けてその開度を調整する。【0040】比例電磁弁703は、マシンコントロール時に目標面下を掘削することのないように、また精度良くマシンコントロールを行なわせるように、アームクラウド速度を減速させるための弁である。比例電磁弁703は、消磁(非通電)時にはその開度は全開であり、励磁(通電)時にその開度をクローズにする。励磁力を増加させるほどその開度が小さくなる。比例電磁弁703は、制御装置67から出力された指令信号303を受けてその開度を調整する。【0041】比例電磁弁704は、マシンコントロール時に目標面下を掘削することのないように、また精度良くマシンコントロールを行なわせるように、アームダンプ速度を減速させるための弁である。比例電磁弁704は、消磁(非通電)時にはその開度は全開であり、励磁(通電)時にその開度をクローズにする。励磁力を増加させるほどその開度が小さくなる。比例電磁弁704は、制御装置67から出力された指令信号304を受けてその開度を調整する。【0042】比例電磁弁705は、マシンコントロール時に目標面下を掘削することのないように、また精度良くマシンコントロールを行なわせるように、バケットクラウド速度を減速させるための弁である。比例電磁弁705は、消磁(非通電)時にはその開度は全開であり、励磁(通電)時にその開度をクローズにする。励磁力を増加させるほどその開度が小さくなる。比例電磁弁705は、制御装置67から出力された指令信号305を受けてその開度を調整する。【0043】比例電磁弁706は、マシンコントロール時に目標面下を掘削することのないように、また精度良くマシンコントロールを行なわせるように、バケットダンプ速度を減速させるための弁である。比例電磁弁706は、消磁(非通電)時にはその開度は全開であり、励磁(通電)時にその開度をクローズにする。励磁力を増加させるほどその開度が小さくなる。比例電磁弁706は、制御装置67から出力された指令信号306を受けてその開度を調整する。【0044】比例電磁弁708は、マシンコントロール時にバケット8の角度を一定に保ちながら施工面を仕上げるように、バケットダンプを強制的に行わせるための弁である。比例電磁弁708は、消磁(非通電)時にはその開度はゼロ(全閉)であり、励磁(通電)時にその開度をオープンにする。励磁力を増加させるほどその開度が大きくなる。比例電磁弁708は、制御装置67から出力された指令信号308を受けてその開度を調整する。【0045】比例電磁弁709は、マシンコントロール時にバケット8の角度を一定に保ちながら施工面を仕上げるように、バケットクラウドを強制的に行わせるための弁である。比例電磁弁709は、消磁(非通電)時にはその開度はゼロ(全閉)であり、励磁(通電)時にその開度をオープンにする。励磁力を増加させるほどその開度が大きくなる。比例電磁弁709は、制御装置67から出力された指令信号309を受けてその開度を調整する。【0046】シャトル弁115は高圧優先形のシャトル弁であり、2つの入口ポートと1つの出口ポートを有している。シャトル弁115の入口ポートの一方は、比例電磁弁705からのパイロット配管285に接続され、出口ポートにパイロット配管275が接続されている。シャトル弁115の入口ポートの他方は、比例電磁弁709からのパイロット配管295に接続されている。パイロット配管295からの作動油は、バケットクラウド用パイロット圧制御弁35を介さず固定容量型パイロットポンプ22から流入されるようになっている。すなわち、バケット用操作部材29の操作量に依存せずパイロット配管295に作動油が供給される。【0047】シャトル弁116は高圧優先形のシャトル弁であり、2つの入口ポートと1つの出口ポートを有している。シャトル弁116の入口ポートの一方は、比例電磁弁706からのパイロット配管286に接続され、出口ポートにパイロット配管276が接続されている。シャトル弁116の入口ポートの他方は、比例電磁弁708からのパイロット配管296に接続されている。パイロット配管296からの作動油は、バケットダンプ用パイロット圧制御弁36を介さず固定容量型パイロットポンプ22から流入されるようになっている。すなわち、バケット用操作部材29の操作量に依存せずパイロット配管296に作動油が供給される。【0048】なお、切替用油圧ユニットA1、およびマシンコントロール用油圧ユニットA2は、必ずしもユニットになっている必要はない。また、切替弁501などの油圧部品の一部がそれぞれユニットA1、およびA2の外に配置されていても良い。【0049】ここで、図5~図9を用いて、本実施の形態の基本原理を説明する。【0050】図5及び図6は、油圧ショベルにおける掘削施工の一例を示す図である。【0051】図5及び図6に示すように、油圧ショベル100における掘削施工においては、例えば、まず、ブーム用操作部材27によりブームシリンダ9を伸長側に駆動してブーム6を十分な高さまで回動させた状態で(図5:ブーム上げ)、アーム用操作部材28によりアームシリンダ10が完全に収縮するまで収縮側に駆動してアーム7を回動させ(図5:アームダンプ)、続いて、ブーム用操作部材27によりブームシリンダ9を収縮側に駆動してフロント作業機3を回動させることでバケット8の先端を掘削施工の目標面の位置まで下げる(図5:ブーム下げ)。続いて、アームシリンダ10を収縮側に駆動してアーム7を回動させ(図6:アームクラウド)、掘削施工を行う。ここで、マシンコントロールにおいては、制御装置67の制御によってブームシリンダ9の伸長側への駆動の制限(図5のブーム下げ時など)やブームシリンダ9の収縮側への駆動(図6のアームクラウド時)を行うことにより、フロント作業機3の例えばバケット8の先端を掘削施工の目標面に沿って移動させる(領域制限制御)。【0052】図7は、駆動装置のうちアームシリンダの駆動に係る構成を抜き出して示す図である。【0053】図7に示すように、アームシリンダ10の駆動に係る駆動装置には、アームシリンダ10のボトム側の圧力を検出するボトム圧センサ52、ロッド側の圧力を検出するロッド圧センサ53、アーム用操作部材28により駆動されるアームクラウド用パイロット圧制御弁33とアームシリンダ10とを接続するアームクラウド用パイロット配管42における比例電磁弁703の下流側の圧力を検出するアームクラウド減圧弁後圧センサ54、及び、アームダンプ用パイロット圧制御弁34とアームシリンダ10とを接続するアームダンプ用パイロット配管43における比例電磁弁704の下流側の圧力を検出するアームダンプ減圧弁後圧センサ55が設けられている。なお、図7においては、説明の簡単のためにシャトルブロック39を含むいくつかの構成を省略して示している。【0054】アームダンプ操作時、固定容量型パイロットポンプ22からの圧油は、ロック弁25、アームダンプ用パイロット圧制御弁34、アームダンプ用パイロット配管43を介し、アーム用流量制御弁49に作用する。これにより、可変容量型ポンプ21からの圧油は、アーム用流量制御弁49を介し、アームシリンダ10のロッド側に流入する。アームシリンダ10のロッド側には、アームシリンダ10のストロークが最収縮するまで圧油が流入され続け、最収縮後は、アームシリンダ10のロッド側にさらに流入されようとしていた圧油は、可変容量型ポンプ21とアーム用流量制御弁49の間に配置されている図示しないリリーフ弁を通じてタンク24に排出される。【0055】ここで、アームシリンダ10のストロークが最収縮となるに至るまでのアームダンプ操作の操作量や操作方法により、アームシリンダ10のロッド側の内部圧力の大きさが異なってくる。例えば、アームシリンダ10のストロークが最伸長の状態から最収縮となるに至るまで、アームダンプ操作をフルレバー操作で行なった場合は、アームシリンダ10が比較的勢いよく最収縮状態となるので、アームシリンダ10のロッド側は比較的高圧となる。また、アームダンプ操作を微操作にしてアームシリンダ10のストロークを最収縮とした場合は、アームシリンダ10のロッド側は比較的低圧となる。【0056】次に、アームシリンダ10が最収縮の状態から、ブーム下げ操作を行ないバケット8の爪先を掘削施工の目標面上に位置合わせしたのち、アームクラウド操作をすることでアームシリンダ10を伸長側に駆動させる。アームクラウド操作時の固定容量型パイロットポンプ22からの圧油は、ロック弁25、アームクラウド用パイロット圧制御弁33、アームクラウド用パイロット配管42を介し、アーム用流量制御弁49に作用する。これにより、可変容量型ポンプ21からの圧油は、アーム用流量制御弁49を介し、アームシリンダ10のボトム側に流入する。アームシリンダ10のロッド側の圧油はタンク24に流れるので、次第に推力は増加することになる。アームクラウド操作直前のアームシリンダ10のロッド圧が大きいほど、アームクラウド操作直後のシリンダ伸長方向の推力は小さくなる。【0057】マシンコントロールの機能が有効である場合、アームクラウド操作を行うと、バケット8の爪先の目標面下への侵入を回避して爪先が目標面に沿って移動するようにブーム上げ増圧制御が行われる。ブーム上げ増圧量は、アームクラウド操作量や、アーム用流量制御弁49に作用する圧力などから決定される。【0058】ここで、同じようにアームクラウド操作を行なったとしても、アームシリンダ10のロッド圧の大小によって、アームシリンダ10の駆動の様子に差異が現れることがある。つまり、アームシリンダ10のロッド圧が大きいときは、アームクラウド操作直後にはアームシリンダ10は比較的ゆっくり駆動し、その間にブーム増圧が作用するので、バケット8の爪先の軌跡は、掘削施工目標面に比較的追従する、もしくは掘削施工目標面に対して比較的浮き上がる傾向となる。また、アームシリンダ10のロッド圧が小さいときは、アームクラウド操作直後にはアームシリンダ10は比較的速く駆動するため、アームクラウド操作直後のバケット爪先の軌跡は、掘削施工目標面に対して比較的沈み込む傾向となる。ここに本発明に関する課題がある。アームロッド圧によって制御方法を切り分ける必要がある。【0059】図8は、従来技術におけるアームクラウド時のバケットのツメ先の軌跡を示す図である。【0060】図8に示すように、アームダンプ操作を微操作で行なった後のアームクラウド時の爪先の軌跡は、目標面に沿っている。一方、アームダンプ操作をフルレバー操作で行なった後のアームクラウド時の爪先の軌跡は、目標面への進入が見られる。これは、アームシリンダ10のロッド圧が小さい場合、アームクラウド操作直後にアーム7(アームシリンダ10)が機敏に動きやすくなることが要因であり、図8の例では、ブーム増圧制御の応答遅れの影響がバケット8の爪先の軌跡に顕著に現れている。このように、アームダンプ時の操作状況によって、アームクラウド操作直後のアームシリンダ10の挙動にばらつきが生じる可能性がある。さらに、従来技術においては、ブーム増圧制御にアームクラウド減圧弁後圧に基づくアームシリンダ速度Vaを用いているが、この制御方法では、アームクラウド操作直後において、アームクラウド減圧弁後圧が立ち上がってからブーム増圧制御が作用することになる。そのため、ブーム増圧制御の応答遅れに起因するアームクラウド操作直後のバケット8の爪先の目標面下への侵入が発生する。【0061】図9は、掘削施工目標面上にてアームクラウド操作を入力したときの、アームクラウド操作圧L1、アームクラウド減圧指令圧L2、及びアームクラウド減圧弁後圧L3の波形を示す図である。アームクラウド操作直後、アームクラウド減圧指令圧の立ち上がりに対して、アームクラウド減圧弁後圧の立ち上がりが遅れていることが確認できる。本実施の形態においては、アームクラウド減圧指令圧L2とアームクラウド減圧弁後圧L3の立ち上がりの違いを利用して、アームクラウド減圧弁後圧に基づくアームシリンダ速度Vaと、アームクラウド減圧指令圧に基づくアームシリンダ速度Vbにより、ブーム増圧制御を行うものである。【0062】図10は、制御装置の処理機能を示す機能ブロック図である。【0063】図10に示すように、制御装置67は、フロント姿勢演算部67a、領域設定演算部67b、バケット先端速度の制限値演算部67c、アームシリンダ速度演算部67d、アームによるバケット先端速度演算部67e、ブームによるバケット先端速度の制限値演算部67f、ブームシリンダ速度の制限値演算部67g、ブーム指令の制限値演算部67h、ブーム用バルブ指令演算部67i、ブーム指令の最大値演算部67j、アーム用バルブ指令演算部67k、及び、アームシリンダ内差圧演算部67lの各機能部を有している。【0064】フロント姿勢演算部67aでは、ブーム6、アーム7、バケット8に設けられた角度検出器3a~3c(例えば、IMU:慣性計測装置など)及び上部旋回体2に設けられた傾斜角検出器3dで検出したブーム6、アーム7、バケット8の回動角及び上部旋回体2の前後の傾斜角に基づきフロント作業機3の各部の位置と姿勢を演算する。【0065】領域設定演算部67bでは、オペレータによる設定器200の操作により、バケット8の先端が動き得る掘削領域の設定演算を行う。また、設定器200で指示された傾斜角により目標面を設定する。【0066】ここで、制御装置67の図示しない記憶装置には、フロント作業機3や上部旋回体2、下部走行体1などの油圧ショベル100の各部の寸法が記憶されており、領域設定演算部67bではフロント姿勢演算部67aにてこれらのデータと、角度検出器3a,3b,3cで検出した回動角及び傾斜角検出器3dで検出した上部旋回体2の傾斜角を用いてバケット8の先端の位置を計算する
バケット先端速度の制限値演算部67cでは、バケット8の先端の目標面からの距離に基づき、バケット先端速度の目標面に垂直な成分の制限値を計算する。【0067】アームシリンダ速度演算部67dでは、アーム用操作部材28によるアーム用流量制御弁49への指令値(アームクラウド減圧弁後圧センサ54およびアームダンプ減圧弁後圧センサ55の検出結果)と、アーム用流量制御弁49の流量特性とに基づいてアームシリンダ速度Vaを推定する。【0068】アームによるバケット先端速度演算部67eでは、アームシリンダ速度とフロント姿勢演算部67aで求めたフロント作業機3の各部の位置と姿勢によりアーム7によるバケット先端速度を演算する。【0069】アームシリンダ内差圧演算部67lでは、アームシリンダ10のボトム側の圧力を検出するボトム圧センサ52の検出結果とロッド側の圧力を検出するロッド圧センサ53の検出結果とから、アームシリンダ10のボトム側とロッド側の差圧Pを演算する。【0070】ブームによるバケット先端速度の制限値演算部67fでは、演算部67eで求めたアーム7によるバケット先端速度を演算部67lで求めた差圧Pに基づいて補正(アームシリンダ速度補正処理)し、領域設定演算部67bで求めた変換データを用いてXY座標系からXaYa座標系へ変換し、アーム7によるバケット先端速度の目標面に垂直な成分(bx,by)を演算し、演算部67cで求めたバケット先端速度の目標面に垂直な成分の制限値とそのアームによるバケット先端速度の目標面に垂直な成分により、ブームによるバケット先端速度の目標面に垂直な成分の制限値を演算する。【0071】図11は、アームシリンダ速度補正処理を示すフローチャートである。【0072】図11において、制御装置67のブームによるバケット先端速度の制限値演算部67fは、まず、施工動作開始姿勢としたとき(最収縮でなくても良い)のアームシリンダ10のボトム圧とロッド圧の差圧Pが予め定めた値(閾値P0)以上であるかどうかを判定し(ステップS100)、判定結果がYESの場合には、アームクラウド操作直後はアームクラウド減圧弁後圧L3に基づくバケット先端速度(アームシリンダ速度Vaを用いて演算)によりブーム増圧制御を行う(ステップS110)。すなわち、アームクラウド操作直前のアームシリンダロッド圧が高圧のため、アームクラウド操作直後のアームシリンダは比較的ゆっくりした速度で駆動し、アームクラウド操作に対する立ち上がりが遅いアームクラウド減圧弁後圧に基づくアームシリンダ速度Vaによりブーム増圧制御を行う。【0073】また、ステップS100での判定結果がNOの場合には、アームクラウド操作直後はアームクラウド減圧指令圧L2に基づくバケット先端速度(アームシリンダ速度Vbを用いて演算)によりブーム増圧制御を行う(ステップS101)。すなわち、アームクラウド操作直前のアームシリンダロッド圧が低圧のため、アームクラウド操作直後のアームシリンダは比較的機敏に駆動し、アームクラウド操作に対する立ち上がりが早いアームクラウド減圧指令圧に基づくアームシリンダ速度Vbによりブーム増圧制御を行う。【0074】図10に戻る。【0075】ブームシリンダ速度の制限値演算部67gでは、ブーム6によるバケット先端速度の目標面に垂直な成分の制限値とフロント作業機3の各部の位置と姿勢に基づき、変換データを用いた座標変換によりブームシリンダ速度の制限値を演算する。【0076】ブーム指令の制限値演算部67hでは、ブーム用流量制御弁48の流量特性に基づき、演算部67gで求めたブームシリンダ速度の制限値に対応するブーム6の指令制限値を求める。【0077】ブーム指令の最大値演算部67jでは、演算部67hで求めたブーム指令の制限値とブーム用操作部材27によるブーム用流量制御弁48への指令値(アームシリンダ10に対応するものと同様に設けられたブーム上げクラウド減圧弁後圧センサ56およびブーム下げ減圧弁後圧センサ57の検出結果)とを比較し、大きい方を出力する。【0078】ブーム用バルブ指令演算部67iでは、ブーム指令の最大値演算部67jから出力された指令値が正の値の場合にはブーム用流量制御弁48のブーム上げ側への駆動に係る比例電磁弁707に対応する電圧を出力する。【0079】アーム用バルブ指令演算部67kでは、アーム用操作部材28によるアーム用流量制御弁49への指令値(アームクラウド減圧弁後圧センサ54およびアームダンプ減圧弁後圧センサ55の検出結果)を入力し、当該指令値がアームクラウドの指令値である場合にはアーム用流量制御弁49のアームクラウド側への駆動に係る比例電磁弁703に対応する電圧を出力し、アームダンプ側への駆動に係る比例電磁弁704には0の電圧を出力し、指令値がアームダンプの指令値である場合には逆にする。【0080】以上のように構成した本実施の形態の効果を説明する。【0081】マシンコントロール機能を備えた油圧ショベルなどの作業機械においては、フロント作業機の自動制御にて目標面に沿って掘削施工が行なわれる。しかしながら、フロント作業機が駆動し始める箇所においては、マシンコントロールにおいて掘削施工の精度にばらつきがあり、その一因としては、動作サイクルごとの駆動開始直前のシリンダ内部圧力の大きさの違いが挙げられる。すなわち、マシンコントロールにおける駆動開始直前のシリンダ内部圧力が動作サイクルごとに異なると、フロント作業機の駆動開始時の駆動速度の精度に差異が発生し、結果としてマシンコントロールにおける掘削施工の精度にばらつきが生じてしまう。【0082】これに対して本実施の形態においては、複数の被駆動部材(ブーム6、アーム7、バケット8)を連結して構成された多関節型のフロント作業機3と、操作信号に基づいて複数の被駆動部材をそれぞれ駆動する複数の油圧アクチュエータ(ブームシリンダ9、アームシリンダ10、バケットシリンダ11)と、複数の油圧アクチュエータのうち操作者の所望する油圧アクチュエータに操作信号を出力する操作装置(ブーム用操作部材27、アーム用操作部材28、バケット用操作部材29)と、フロント作業機3による作業対象に対して予め設定された目標面上およびその上方の領域内でフロント作業機が動くように、複数の油圧アクチュエータのうち少なくとも1つの油圧アクチュエータに操作信号を出力するか、又は出力された操作信号を補正する領域制限制御を実行する制御装置67とを備えた油圧ショベル100において、制御装置67は、領域制限制御を行う油圧アクチュエータの領域制限制御を行う直前の動作に係る情報に基づいて操作信号を補正するように構成した。【0083】図12は、本実施の形態におけるアームクラウド時のバケットのツメ先の軌跡を比較例である従来技術の軌跡とともに示す図である。図12に示すように、本実施の形態においては、従来技術と比較して、バケット8の先端の軌跡がより目標面に沿って移動することがわかる。このように、本実施の形態においては、マシンコントロールにおける掘削施工の精度を向上することができる。【0084】<第1の実施の形態の変形例>
第1の実施の形態の変形例を図13及び図14を参照しつつ説明する。【0085】本変形例は、第1の実施の形態に対して、アームシリンダのボトム圧とロッド圧の差圧Pに基づいて求められる比率に応じてアームシリンダ速度Va,Vbを用いたバケット先端速度の演算を行うものである。【0086】図13は、本変形例に係るアームシリンダ速度補正処理を示すフローチャートである。また、図14は、アームシリンダのボトム圧とロッド圧の差圧とアームシリンダ速度の比率との関係を予め定めた比率テーブルの一例を示す図である。図中、第1の実施の形態と同様の部材には同じ符号を付し、説明を省略する。【0087】図13において、制御装置67のブームによるバケット先端速度の制限値演算部67fは、まず、施工動作開始姿勢としたとき(アームシリンダ10のストロークが最収縮にいたる直前)のアームシリンダ10のボトム圧とロッド圧の差圧Pを計測し(ステップS200)、アームシリンダのボトム圧とロッド圧の差圧Pにより、図12に示す比率テーブルを用いて、アームクラウド減圧弁後圧に基づくアームシリンダ速度Vaとアームクラウド減圧指令圧に基づくアームシリンダ速度Vbの重み付けを決定し(ステップS210)、重み付けγにより算出したアームシリンダ速度を(γ×Va+(1-γ)×Vb)を用いてブーム増圧制御を行う(ステップS220)。例えば、差圧Pが比較的低圧であった場合にアームクラウド減圧指令圧に基づくアームシリンダ速度Vbを積極的に用いるように比率テーブルは設定されている。例えば、ブーム増圧制御に用いるアームシリンダ速度は、γ=0.2の場合には、0.2Va+0.8Vbで表される。【0088】その他の構成は第1の実施の形態と同様である。【0089】以上のように講師した本変形例においても第1の実施の形態と同様の効果を得ることができる。【0090】<第2の実施の形態>
第2の実施の形態を図15~図17を参照しつつ説明する。【0091】本実施の形態は、ストロークが最収縮となるに至る直前のアームダンプ操作の操作量αに基づいて操作信号を補正するものである。【0092】図15は、本実施の形態に係る駆動装置のうちアームシリンダの駆動に係る構成を抜き出して示す図である。また、図16は本実施の形態に係る制御装置の処理機能を示す機能ブロック図であり、図17は本実施の形態に係るアームシリンダ速度補正処理を示すフローチャートである。図中、第1の実施の形態と同様の部材には同じ符号を付し、説明を省略する。【0093】図15に示すように、アームシリンダ10の駆動に係る駆動装置には、アーム用操作部材28により駆動されるアームクラウド用パイロット圧制御弁33とアームシリンダ10とを接続するアームクラウド用パイロット配管42における比例電磁弁703の下流側の圧力を検出するアームクラウド減圧弁後圧センサ54、アームダンプ用パイロット圧制御弁34とアームシリンダ10とを接続するアームダンプ用パイロット配管43における比例電磁弁704の下流側の圧力を検出するアームダンプ減圧弁後圧センサ55、及び、アームシリンダ10のストローク長(ロッド位置)を検出するアームシリンダストロークセンサ110が設けられている。なお、本実施の形態におけるアームシリンダ10の駆動に係る駆動装置は、第1の実施の形態と比較して、アームシリンダ10のボトム側の圧力を検出するボトム圧センサ52およびロッド側の圧力を検出するロッド圧センサ53を有しない構成となっている。【0094】図16に示すように、制御装置67は、フロント姿勢演算部67a、領域設定演算部67b、バケット先端速度の制限値演算部67c、アームシリンダ速度演算部67d、アームによるバケット先端速度演算部67e、ブームによるバケット先端速度の制限値演算部67f、ブームシリンダ速度の制限値演算部67g、ブーム指令の制限値演算部67h、ブーム用バルブ指令演算部67i、ブーム指令の最大値演算部67j、アーム用バルブ指令演算部67k、及び、アームシリンダ内差圧推定演算部67mの各機能部を有している。【0095】アームシリンダ内差圧推定演算部67mでは、アームダンプ用パイロット配管43における比例電磁弁704の下流側の圧力を検出するアームダンプ減圧弁後圧センサ55の検出結果とアームシリンダストロークセンサ110の検出結果とから、アームシリンダ10のアームダンプ操作量αを演算する。【0096】図17において、制御装置67のブームによるバケット先端速度の制限値演算部67fは、まず、施工動作開始姿勢としたとき(アームシリンダ10のストロークが最収縮にいたる直前)のアームシリンダ10のアームダンプ操作量αが予め定めた値(閾値α0)以上であるかどうかを判定し(ステップS300)、判定結果がYESの場合には、アームクラウド操作直後はアームクラウド減圧弁後圧L3に基づくバケット先端速度(アームシリンダ速度Vaを用いて演算)によりブーム増圧制御を行う(ステップS310)。すなわち、アームクラウド操作直前のアームシリンダロッド圧が高圧のため、アームクラウド操作直後のアームシリンダは比較的ゆっくりした速度で駆動し、アームクラウド操作に対する立ち上がりが遅いアームクラウド減圧弁後圧に基づくアームシリンダ速度Vaによりブーム増圧制御を行う。【0097】また、ステップS300での判定結果がNOの場合には、アームクラウド操作直後はアームクラウド減圧指令圧L2に基づくバケット先端速度(アームシリンダ速度Vbを用いて演算)によりブーム増圧制御を行う(ステップS301)。すなわち、アームクラウド操作直前のアームシリンダロッド圧が低圧のため、アームクラウド操作直後のアームシリンダは比較的機敏に駆動し、アームクラウド操作に対する立ち上がりが早いアームクラウド減圧指令圧に基づくアームシリンダ速度Vbによりブーム増圧制御を行う。【0098】その他の構成は第1の実施の形態と同様である。【0099】以上のように講師した本実施の形態においても第1の実施の形態と同様の効果を得ることができる。【0100】なお、本実施の形態に置いては、アームシリンダストロークセンサ110によりアームシリンダ10のストローク長を検出するように構成したが、例えば、フロント作業機3のブーム6及びアーム7にそれぞれ設けられた角度検出器3a,3bの検出結果からブーム6とアーム7の相対角度を算出し、その算出結果からアームシリンダのストローク長を算出するように構成してもよい。【0101】<第2の実施の形態の変形例>
第2の実施の形態の変形例を図18及び図19を参照しつつ説明する。【0102】本変形例は、第2の実施の形態に対して、アームシリンダのアームダンプ操作量αに基づいて求められる比率に応じてアームシリンダ速度Va,Vbを用いたバケット先端速度の演算を行うものである。【0103】図18は、本変形例に係るアームシリンダ速度補正処理を示すフローチャートである。また、図19は、アームダンプ操作量とアームシリンダ速度の比率との関係を予め定めた比率テーブルの一例を示す図である。図中、第1及び第2の実施の形態と同様の部材には同じ符号を付し、説明を省略する。【0104】図18において、制御装置67のブームによるバケット先端速度の制限値演算部67fは、まず、施工動作開始姿勢としたとき(アームシリンダ10のストロークが最収縮にいたる直前)のアームシリンダ10のアームダンプ操作量を計測し(ステップS400)、アームダンプ操作量αにより、図19に示す比率テーブルを用いて、アームクラウド減圧弁後圧に基づくアームシリンダ速度Vaとアームクラウド減圧指令圧に基づくアームシリンダ速度Vbの重み付けを決定し(ステップS410)、重み付けβにより算出したアームシリンダ速度を(β×Va+(1-β)×Vb)を用いてブーム増圧制御を行う(ステップS420)。【0105】その他の構成は第1及び第2の実施の形態と同様である。【0106】以上のように講師した本変形例においても第1の実施の形態と同様の効果を得ることができる。【0107】<第3の実施の形態>
第3の実施の形態を図20を参照しつつ説明する。【0108】本実施の形態は、アームダンプ操作圧によらずアームシリンダロッド圧が一定となるように、アームダンプ操作圧をアームダンプ比例電磁弁で減圧制御するものである。【0109】図20は、アームシリンダのストローク長とアームダンプ減圧指令圧との関係を予め定めた指令圧算出テーブルの一例を示す図である。図中、他の実施の形態および変形例と同様の部材には同じ符号を付し、説明を省略する。【0110】アームダンプ操作によりアームシリンダを収縮させる際、最収縮までの長さが一定値D1以内になった場合にアームダンプ比例電磁弁でアームダンプ操作圧を減圧させる。そして一定値D0以内ではアームダンプ比例電磁弁を全閉にして、アームダンプ操作入力をしてもアームシリンダを駆動させないようにする。そうすることで、アームダンプ操作量によらず、アームシリンダロッド圧を一律で低圧とすることが可能となるため、施工動作の度にアームクラウド操作直後の挙動に現れる差異を防止することができる。【0111】その他の構成は他の実施の形態および変形例と同様である。【0112】以上のように構成した本実施の形態においても他の実施の形態および変形例と同様の効果を得ることができる。【0113】次に上記の各実施の形態の特徴について説明する。【0114】(1)上記の実施の形態では、複数の被駆動部材(例えば、ブーム6、アーム7、バケット8)を連結して構成された多関節型のフロント作業機3と、操作信号に基づいて前記複数の被駆動部材をそれぞれ駆動する複数の油圧アクチュエータ(例えば、ブームシリンダ9、アームシリンダ10、バケットシリンダ11)と、前記複数の油圧アクチュエータのうち操作者の所望する油圧アクチュエータに前記操作信号を出力する操作装置(例えば、ブーム用操作部材27、アーム用操作部材28、バケット用操作部材29)と、前記フロント作業機による作業対象に対して予め設定された目標面上およびその上方の領域内で前記フロント作業機が動くように、前記複数の油圧アクチュエータのうち少なくとも1つの油圧アクチュエータに前記操作信号を出力するか、又は出力された前記操作信号を補正する領域制限制御を実行する制御装置67とを備えた作業機械(例えば、油圧ショベル100)において、前記制御装置は、前記領域制限制御を行う前記油圧アクチュエータの前記領域制限制御を行う直前の動作に係る情報に基づいて前記操作信号を補正するものとした。【0115】これにより、マシンコントロールにおける掘削施工の精度を向上することができる
(2)また、上記の実施の形態では、(1)の作業機械(例えば、油圧ショベル100)において、前記油圧アクチュエータ(例えば、ブームシリンダ9、アームシリンダ10、バケットシリンダ11)は、ボトム側又はロッド側に供給される作動油によって伸長又は縮退動作を行う油圧シリンダであり、前記制御装置67は、前記領域制限制御を行う直前の前記油圧シリンダのボトム側とロッド側の差圧に基づいて、前記油圧シリンダに入力される操作信号に基づく前記油圧シリンダの速度に応じた前記操作信号の補正と、前記油圧シリンダの目標速度に基づく前記操作信号の補正の何れか一方を選択するものとした。【0116】(3)また、上記の実施の形態では、(1)の作業機械(例えば、油圧ショベル100)において、前記油圧アクチュエータ(例えば、ブームシリンダ9、アームシリンダ10、バケットシリンダ11)は、ボトム側又はロッド側に供給される作動油によって伸長又は縮退動作を行う油圧シリンダであり、前記制御装置67は、前記領域制限制御を行う直前の前記油圧シリンダのボトム側とロッド側の差圧に基づいて、前記油圧シリンダに入力される操作信号に基づく前記油圧シリンダの速度と前記油圧シリンダの目標速度との比率を求め、前記比率に応じた前記油圧シリンダの速度と前記油圧シリンダの目標速度とに基づいて前記操作信号を補正するものとした。【0117】(4)また、上記の実施の形態では、(1)の作業機械(例えば、油圧ショベル100)において、前記油圧アクチュエータ(例えば、ブームシリンダ9、アームシリンダ10、バケットシリンダ11)は、ボトム側又はロッド側に供給される作動油によって伸長又は縮退動作を行う油圧シリンダであり、前記制御装置67は、前記領域制限制御を行う直前の前記油圧シリンダに応じた前記操作装置の操作量に基づいて、前記油圧シリンダに入力される操作信号に基づく前記油圧シリンダの速度に応じた前記操作信号の補正と、前記油圧シリンダの目標速度に基づく前記操作信号の補正との何れか一方を選択するものとした。【0118】(5)また、上記の実施の形態では、(1)の作業機械(例えば、油圧ショベル100)において、前記油圧アクチュエータ(例えば、ブームシリンダ9、アームシリンダ10、バケットシリンダ11)は、ボトム側又はロッド側に供給される作動油によって伸長又は縮退動作を行う油圧シリンダであり、前記制御装置67は、前記領域制限制御を行う直前の前記油圧シリンダに応じた前記操作装置の操作量に基づいて、前記油圧シリンダに入力される操作信号に基づく前記油圧シリンダの速度と前記油圧シリンダの目標速度との比率を求め、前記比率に応じた前記油圧シリンダの速度と前記油圧シリンダの目標速度とに基づいて前記操作信号を補正するものとした。【0119】(6)また、上記の実施の形態では、(1)~(5)の何れか1つの作業機械(例えば、油圧ショベル100)において、前記油圧アクチュエータ(例えば、ブームシリンダ9、アームシリンダ10、バケットシリンダ11)は、ボトム側又はロッド側に供給される作動油によって伸長又は縮退動作を行う油圧シリンダであり、前記制御装置67は、前記油圧シリンダのストローク長に基づいて、前記油圧シリンダのロッド側に供給される作動油の油量を制御するものとした。【0120】<付記>
なお、本発明は上記の実施の形態に限定されるものではなく、その要旨を逸脱しない範囲内の様々な変形例や組み合わせが含まれる。また、本発明は、上記の実施の形態で説明した全ての構成を備えるものに限定されず、その構成の一部を削除したものも含まれる。また、上記の各構成、機能等は、それらの一部又は全部を、例えば集積回路で設計する等により実現してもよい。また、上記の各構成、機能等は、プロセッサがそれぞれの機能を実現するプログラムを解釈し、実行することによりソフトウェアで実現してもよい。【符号の説明】
【0121】1…下部走行体、2…上部旋回体、3…フロント作業機、3a~3c…角度検出器、3d…傾斜角検出器、4…走行履帯、5…旋回装置、6…ブーム、7…アーム、8…バケット、9…ブームシリンダ、10…アームシリンダ、11…バケットシリンダ、12…旋回用モータ、21…可変容量型ポンプ、22…固定容量型パイロットポンプ、23…原動機、24…タンク、25…ロック弁、26…レギュレータ、27…ブーム用操作部材、28…アーム用操作部材、29…バケット用操作部材、30…旋回用操作部材、31…ブーム上げ用パイロット圧制御弁、32…ブーム下げ用パイロット圧制御弁、33…アームクラウド用パイロット圧制御弁、34…アームダンプ用パイロット圧制御弁、35…バケットクラウド用パイロット圧制御弁、36…バケットダンプ用パイロット圧制御弁、37…旋回右回転用パイロット圧制御弁、38…旋回左回転用パイロット圧制御弁、39…シャトルブロック、40…ブーム上げ用パイロット配管、41…ブーム下げ用パイロット配管、42…アームクラウド用パイロット配管、43…アームダンプ用パイロット配管、44…バケットクラウド用パイロット配管、45…バケットダンプ用パイロット配管、46…旋回右回転用パイロット配管、47…旋回左回転用パイロット配管、48…ブーム用流量制御弁、49…アーム用流量制御弁、50…バケット用流量制御弁、51…旋回用流量制御弁、52…ボトム圧センサ、53…ロッド圧センサ、54…アームクラウド減圧弁後圧センサ、55…アームダンプ減圧弁後圧センサ、56…クラウド減圧弁後圧センサ、57…減圧弁後圧センサ、67…制御装置、67a…フロント姿勢演算部、67b…領域設定演算部、67c…演算部、67c…制限値演算部、67d…アームシリンダ速度演算部、67e…演算部、67e…バケット先端速度演算部、67f…制限値演算部、67g…演算部、67g…制限値演算部、67h…演算部、67h…制限値演算部、67i…ブーム用バルブ指令演算部、67j…最大値演算部、67k…アーム用バルブ指令演算部、67l…演算部、67l…アームシリンダ内差圧演算部、67m…アームシリンダ内差圧推定演算部、100…油圧ショベル、110…アームシリンダストロークセンサ、114~116…シャトル弁、200…設定器、201~208,211~216,222~226,232~236,242~246,252~256,275~277,285,286,296…パイロット配管、301~309…指令信号、501~505…切替弁、601~605…指令信号、701…電磁切替弁、702~709…比例電磁弁


コメント