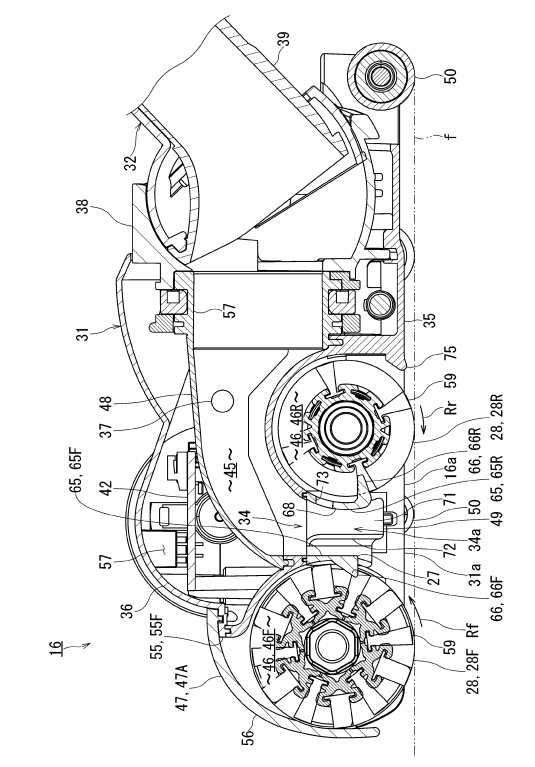
【要約】 【課題】床面から塵埃掻き出す効率は維持しつつ、吸込口体の床面への張り付きを抑制可能とし、使い勝手を向上できる電気掃除機を提供する。【解決手段】電気掃除機は、被掃除面に対向して底面に開口された吸込開口16aから吸込室45へと連接する主風路34aを間に挟んで配置されて吸込口本体31に回転可能に支持される前清掃体28Fおよび後清掃体28Rと、掃除の状態を検知する検知部37他の検知結果に基づき、前清掃体28Fおよび後清掃体28Rの回転を制御する吸込口体制御部42とを備える。吸込口体制御部42の検知結果が、予め設定された第一条件の場合、前清掃体28Fおよび後清掃体28Rを吸込口体16の前進を補助する方向Rfに回転させ、または従動させる。また予め設定された第二条件の場合には、前清掃体28Fを、前進を補助する方向Rfに回転させ、且つ、後清掃体28Rを、吸込口体16の後退を補助する方向Rrに回転させる。【選択図】図7
特許出願公開-係属中
出願番号JP2020212870A
出願日2020-12-22
公開番号JP2022099106
公開日2022-07-04
被引用件数 (JP・US) 0
引用件数 0
早期審査 (JP) 0
出願人東芝ライフスタイル株式会社
発明者大下 悟 , 大島 郁夫
代理人/特許事務所特許業務法人東京国際特許事務所
【発明の詳細な説明】
【技術分野】
【0001】本発明に係る実施形態は、電気掃除機に関する。【背景技術】
【0002】掃除機本体と、掃除機本体に接続される延長管と、延長管に接続される吸込口体と、を有する電気掃除機が知られている。【0003】電気掃除機の吸込口体は、床面に平行に配置され、且つ回転方向および回転数の異なる複数個の回転ブラシを備えている。【先行技術文献】
【0004】【特許文献1】
特開平5-111449号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】従来の電気掃除機は、吸込口体の2本の回転ブラシを互いに異なる方向に回転させることで、床面から塵埃を効率よく掻き出すことができる反面、吸込口体が床面や床面に設置された絨毯等に張り付いてしまう虞があった。【0006】そのため、吸込口体が床面(床面に設置された絨毯等を含む)へ張り付いた場合には、吸込口体の進行が困難となって操作性が低下し、掃除作業における使用者の負担が増すといった使い勝手の低下を招く問題があった。【0007】そこで、本発明は、床面から塵埃掻き出す効率は維持しつつ、吸込口体の床面への張り付きを抑制し、使い勝手を向上できる電気掃除機を提案する。【課題を解決するための手段】
【0008】前記の課題を解決するため本発明の実施形態に係る電気掃除機は、底面へ向かって開口する吸込口と、前記吸込口に繋がる吸込室と、前記吸込口から前記吸込室へと連接する吸込流路と、前記吸込流路を間に挟んで区画される進行方向前方の第一清掃体室および進行方向後方の第二清掃体室を含む少なくとも2つの清掃体室と、前記第一清掃体室に配置されて前記吸込口体に回転可能に支持される第一回転清掃部材、および前記第二清掃体室に配置されて前記吸込口体に回転可能に支持される第二回転清掃部材を含み、それぞれの前記清掃体室に配置される少なくとも2つの回転清掃部材と、を有する吸込口体と、掃除の状態を検知する検知部と、前記検知部の検知結果に基づき、各前記回転掃除部材の回転を制御する制御部と、を備え、前記制御部は、前記検知部の検知結果が、予め設定された第一条件の場合には、前記第一回転清掃部材を、進行を補助する正転方向に回転させ、且つ、前記第二回転清掃部材を、前記第一回転清掃部材の回転に従動させ、前記検知部の検知結果が、予め設定された第二条件の場合には、前記第一回転清掃部材を、前記正転方向に回転させ、且つ、前記第二回転清掃部材を、前記正転方向とは反対の反転方向に回転させる。【0009】また、本発明の実施形態に係る電気掃除機は、底面へ向かって開口する吸込口と、前記吸込口に繋がる吸込室と、前記吸込口から前記吸込室へと連接する吸込流路と、前記吸込流路を間に挟んで区画される進行方向前方の第一清掃体室および進行方向後方の第二清掃体室を含む少なくとも2つの清掃体室と、前記第一清掃体室に配置されて前記吸込口体に回転可能に支持される第一回転清掃部材、および前記第二清掃体室に配置されて前記吸込口体に回転可能に支持される第二回転清掃部材を含み、それぞれの前記清掃体室に配置される少なくとも2つの回転清掃部材と、を有する吸込口体と、掃除の状態を検知する検知部と、前記検知部の検知結果に基づき、各前記回転掃除部材の回転を制御する制御部と、を備え、前記制御部は、前記検知部の検知結果が、予め設定された第一条件の場合には、前記第一回転清掃部材および前記第二回転清掃部材を、進行を補助する正転方向に回転させ、前記検知部の検知結果が、予め設定された第二条件の場合には、前記第一回転清掃部材を、前記正転方向に回転させ、且つ、前記第二回転清掃部材を、前記正転方向とは反対の反転方向に回転させる。【図面の簡単な説明】
【0010】本発明の実施形態に係る電気掃除機の斜視図。 本発明の実施形態に係る吸込口体を右前方から示す斜視図。 本発明の実施形態に係る吸込口体の平面図。 本発明の実施形態に係る吸込口体の平面図。 本発明の実施形態に係る吸込口体の底面図。 本発明の実施形態に係る吸込口体を下方から見た斜視図。 本発明の実施形態に係る吸込口体の縦断面図。 本発明の実施形態に係る吸込口体の縦断面図。 本発明の実施形態に係る吸込口体の制御ブロック図。【発明を実施するための形態】
【0011】本発明に係る吸込口体および電気掃除機の実施形態について、図1から図9を参照して説明する。【0012】図1は、本発明の実施形態に係る電気掃除機の斜視図である。【0013】図1に示すように、本実施形態に係る電気掃除機1は、例えばスティック型である、電気掃除機1は、把手11を有して手持ち操作可能な掃除機本体12と、掃除機本体12に着脱可能な二次電池13(蓄電池、充電式電池、および充電池とも呼ばれる。)と、掃除機本体12に接続される延長管15と、延長管15に接続される吸込口体16と、を備えている。【0014】なお、電気掃除機1は、キャニスター型、アップライト型、またはハンディ型であっても良い。電気掃除機1は、二次電池13を電源として備えるコードレスタイプであっても良いし、商用交流電源から電源コードを介して電力を得る有線式であっても良い。【0015】掃除機本体12は、把手11を有する本体ケース17と、本体ケース17に収容されて吸込負圧を生じさせる電動送風機18と、本体ケース17に着脱自在に設けられる塵埃分離集塵部19と、主に電動送風機18を制御する本体制御部21と、を備えている。【0016】掃除機本体12は、二次電池13が蓄える電力によって電動送風機18を駆動させ、電動送風機18の駆動によって発生する負圧を延長管15に作用させる。電気掃除機1は、吸込口体16および延長管15を通じて床面から塵埃を含んだ空気(以下、「含塵空気」と呼ぶ。)を吸い込み、含塵空気から塵埃を分離し、分離後の塵埃を捕集し、蓄積すると共に分離後の空気を排気する。【0017】本体ケース17は、側面視において延長管15の延長線上に配置される円筒状の前半部17aと、前半部17aから屈曲して延長管15の延長線から徐々に離れる後半部17bと、を備えている。本体ケース17の前半部17aの上方には、塵埃分離集塵部19が設けられている。本体ケース17の後半部17bは、吸込口体16を床上に配置した使用状態(図2)において、後方へ向かって延びている。【0018】本体ケース17の正面部分には、本体接続口23が設けられている。【0019】本体接続口23は、延長管15を着脱可能な継手である。本体接続口23は、本体ケース17の円筒状の前半部17aから正面へ向かって突出している。本体接続口23は、掃除機本体12の流体的な入口であり、延長管15と塵埃分離集塵部19とを流体的に接続する。掃除機本体12から延長管15を取り外すことによって、本体接続口23は、掃除機本体12を単体で使用する際の吸込口としても機能する。【0020】把手11は本体ケース17に一体に設けられている。把手11は、電気掃除機1で床面を掃除するために、使用者が手で把持する部分である。把手11は、塵埃分離集塵部19の後端部の近傍から本体ケース17の後端部へアーチ状に架かっている。また、把手11は、延長管15中心線の延長線上に交差して配置されている。【0021】把手11の近傍には、把手11を握った使用者が、その手指を動かせる範囲に配置される入力部26が設けられている。【0022】入力部26は、電動送風機18の運転開始操作を受け付ける運転開始スイッチ26aと、電動送風機18の運転停止操作を受け付ける運転停止スイッチ26bと、吸込口体16への電力供給の開始操作および停止操作を受け付けるブラシスイッチ26cと、を備えている。運転開始スイッチ26aおよび運転停止スイッチ26bは、本体制御部21に電気的に接続されている。電気掃除機1の使用者は、入力部26を操作して電動送風機18の運転モードを択一的に選択できる。運転開始スイッチ26aは、電動送風機18の運転中に、運転モードの切替スイッチとしても機能している。この場合、本体制御部21は、運転開始スイッチ26aから操作信号を受け取る度に運転モードを強→中→弱→強→中→弱→………の順に切り換える。なお、入力部26は、運転開始スイッチ26aに代えて、強運転スイッチ(図示省略)、中運転スイッチ(図示省略)、および弱運転スイッチ(図示省略)を個別に備えていても良い。【0023】塵埃分離集塵部19は、掃除機本体12の上面側に配置され、かつ掃除機本体12に着脱できる。塵埃分離集塵部19は、掃除機本体12に流れ込む含塵空気から塵埃を分離し、捕集し、蓄積する一方で、塵埃が除去された清浄な空気を電動送風機18へ送る。塵埃分離集塵部19は、電気掃除機1が吸い込む、塵埃と空気との質量の差異を利用して塵埃と空気とを遠心分離する遠心分離方式であっても良いし、含塵空気から塵埃を濾し取るフィルターを有する濾過分離方式であっても良い。【0024】電動送風機18は、塵埃分離集塵部19から空気を吸い込んで負圧(吸込負圧)を発生させる。【0025】本体制御部21は、マイクロプロセッサ、およびマイクロプロセッサが実行する各種演算プログラム、パラメータなどを記憶する記憶装置を備えている。記憶装置は、予め設定される複数の運転モードに関連する種々の設定(引数)を記憶している。複数の運転モードは電動送風機18の出力に関連付けられている。それぞれの運転モードには、相互に異なる入力値(電動送風機18の入力値、電動送風機18に流れる電流目標値)が設定されている。それぞれの運転モードは、入力部26が受け付ける操作入力に関連付けられている。本体制御部21は、入力部26への操作入力に対応する任意の運転モードを、予め設定される複数の運転モードから択一的に選択する。また、本体制御部21は、選択した運転モードの設定を記憶部から読み出し、読み出した運転モードの設定にしたがって電動送風機18を運転する。【0026】二次電池13は、電動送風機18や本体制御部21で消費される電力を蓄える。二次電池13は、本体ケース17に固定されていても良いし、本体ケース17に着脱可能であっても良い。換言すると、電気掃除機1は、複数の二次電池13を適宜に交換して利用できるものであっても良いし、そうでなくても良い。電気掃除機1に着脱可能に装着されている二次電池13の充電率が低下した場合には、この二次電池13を、充電済みの二次電池13に交換することによって、電気掃除機1は、運転を継続できる。【0027】延長管15および吸込口体16は、電動送風機18から作用する負圧によって、床面上の塵埃を空気と共に吸い込んで掃除機本体12へ案内する。【0028】延長管15は、本体ケース17の本体接続口23および塵埃分離集塵部19を介して電動送風機18の吸込側に流体的に接続されている。延長管15は、使用者が掃除機本体12の把手11を把持した状態で実質的に床面に届く長さを有する。延長管15の一方の端部には、掃除機本体12の本体接続口23に着脱自在な継手構造が設けられている。延長管15の他方の端部には、掃除機本体12の吸込口体16を着脱自在な継手構造が設けられている。延長管15は、伸縮可能であっても良いし、そうでなくても良い。【0029】吸込口体16は、木床や絨毯などの床面上を走行自在または滑走自在であり、走行状態または滑走状態において床面に対向する底面に吸込口27を有する。また、吸込口体16は、回転自在な回転清掃部材28と、回転清掃部材28を駆動させる駆動源としての電動機29と、を備えている。吸込口体16の一方の端部には、延長管15の他方の端部に着脱自在な継手構造が設けられている。吸込口体16は、延長管15を介して電動送風機18の吸込側に流体的に接続されている。吸込口体16、延長管15、および塵埃分離集塵部19は、電動送風機18から吸込口27へ至る吸込風路である。【0030】電気掃除機1は、運転開始スイッチ26aが操作されると電動送風機18を始動させる。例えば、電気掃除機1は、電動送風機18が停止している状態で運転開始スイッチ26aが操作されると、先ず電動送風機18を強運転モードで始動させ、再び運転開始スイッチ26aが操作されると電動送風機18の運転モードを中運転モードに変更し、三度、運転開始スイッチ26aが操作されると電動送風機18の運転モードを弱運転モードに変更し、以下同様に繰り返す。強運転モード、中運転モード、および弱運転モードは、予め設定される複数の運転モードである。強運転モードにおける電動送風機18の入力値が最も大きく、弱運転モードにおける電動送風機18の入力値が最も小さい。始動した電動送風機18は、塵埃分離集塵部19から空気を吸込み、塵埃分離集塵部19内を負圧にする。【0031】塵埃分離集塵部19内の負圧は、本体接続口23、延長管15、および吸込口体16を順次に通じて吸込口27に作用する。電気掃除機1は、吸込口27に作用した負圧によって、被掃除面上の塵埃を空気と共に吸い込んで被掃除面を掃除する。塵埃分離集塵部19は、電気掃除機1に吸い込まれた含塵空気から塵埃を分離し、蓄積する一方で、含塵空気から分離した空気を電動送風機18へ送る。電動送風機18は、塵埃分離集塵部19から吸い込んだ空気を掃除機本体12外へ排気する。【0032】次いで、吸込口体16について詳細に説明する。【0033】図2は、本発明の実施形態に係る吸込口体を右前方から示す斜視図である。【0034】図2に示すように、本実施形態に係る吸込口体16は、略直方体形の吸込口本体31と、吸込口本体31の後部に設けられる接続管32と、を備える。【0035】なお、吸込口体16の前後、左右、上下は、電気掃除機1の使用者を基準に説明する。図2中の実線矢印Xの方向は、吸込口体16の前方または前進方向(進行方向前方)であり、その反対方向は後方または後退方向(進行方向後方)である。また、図2中の実線矢印Yの方向は、吸込口体16の左方(進行方向左方)であり、その反対方向は右方(進行方向右方)である。つまり、吸込口体16の前後方向は吸込口体16の進行方向である。そして、吸込口体16の左右方向は、進行方向の前後方向に対して水平方向に直交している。さらに、図2中の実線矢印Zの方向は、吸込口体16の上方(進行方向上方)であり、その反対方向は下方(進行方向下方)である。つまり、吸込口体16の上下方向は進行方向の上下方向であり、吸込口体16の前後方向および左右方向に対して鉛直方向に直交している。【0036】平面視における吸込口本体31の形状は、前後方向に短辺を有し、左右方向に長辺を有する長方形状である。つまり、吸込口本体31の左右方向の寸法、つまり幅寸法は、吸込口本体31の前後方向の寸法、つまり奥行き寸法より大きい。吸込口本体31は、下ケース35と、下ケース35に覆い被さる上ケース36と、を備えている。【0037】上ケース36の前部、かつ左右の両端側には、電気掃除機1の掃除の状態として、吸込口体16の進行方向における前方の障害物を検知する検知部である接触センサー33がそれぞれ設けられている。障害物としては、壁や家財道具等が挙げられる。【0038】接続管32は、吸込口本体31の後部、かつ幅方向略中央部に設けられる。接続管32は、吸込口本体31に対して回転可能な回転接続管38と、回転接続管38に対して揺動可能な揺動接続管39と、を備えている。【0039】回転接続管38は、吸込口体16の前後方向に延びる中心線(X軸に一致する線分またはX軸に平行な線分)まわりに回転する。この中心線は、吸込口本体31を左右に二分する。【0040】揺動接続管39は、回転接続管38の回転中心線に直交する線分、または、この線分に平行な線分まわりに揺動する。揺動接続管39の自由端部は、延長管15の自由端部に着脱可能な継手である。【0041】図3および図4は、本発明の実施形態に係る吸込口体の平面図である。【0042】図5は、本発明の実施形態に係る吸込口体の底面図である。【0043】図6は、本発明の実施形態に係る吸込口体を下方から見た斜視図である。【0044】図7は、図3のVII-VII線における、本発明の実施形態に係る吸込口体の縦断面図である。【0045】図8は、図3のVIII-VIII線における、本発明の実施形態に係る吸込口体の縦断面図である。【0046】なお、図4では、上ケース36が取り外されている。【0047】図3から図7に示すように、本実施形態に係る吸込口体16は、吸込口本体31と、吸込口本体31に回転可能に支持される回転清掃部材28と、吸込口本体31に収容されて回転清掃部材28の回転駆動力を発生させる駆動源としての電動機29と、電動機29から回転清掃部材28へ駆動力を伝達する動力伝達機構41と、電動機29の運転を制御する制御部である吸込口体制御部42と、を備えている。【0048】また、吸込口本体31は、底面31aへ向かって開口する吸込口27と、吸込口27に繋がる吸込室45と、回転清掃部材28が収容される清掃体室46と、を有している。【0049】さらに、吸込口本体31は、清掃体室46の一部を区画し、かつ回転清掃部材28の外周面の少なくとも一部を目視可能に覆う透過壁47を備えている。【0050】清掃体室46は、吸込室45の外側に区画されている。清掃体室46は、吸込口本体31の底面へ向かって開放されている。【0051】吸込室45は、下ケース35と、上ケース36の内側に収容され、かつ下ケース35の一部に覆い被さる風路カバー48と、吸込口本体31の左右方向に幅広な吸込口27を中央部へ向かって絞る風路狭窄体49と、で区画されている。換言すると、下ケース35、風路カバー48、および風路狭窄体49は、協働して吸込室45を区画している。【0052】吸込口本体31の底面31aには、被掃除面fに接地して吸込口本体31を支える複数の転50が設けられている。複数の転50は、吸込口本体31の左右それぞれの端部に配置される転50と、吸込口本体31の後部中央部に配置される転50と、を含んでいる。また、これら転50のうちの少なくとも一つには、掃除の状態として吸込口体16の移動を検知する検知部であるエンコーダー54が設けられている。【0053】吸込口本体31の下ケース35と上ケース36との間には、空間が区画されている。この空間は、電動機29が収容される電動機室51と、動力伝達機構41が収容される機械室52と、吸込口体制御部42が収容される制御室53と、を含んでいる。これら電動機室51、機械室52、および制御室53は、繋がっていても良いし、分断されていても良い。【0054】制御室53は、平面視において、吸込口本体31の前後左右の中央部に配置されている。【0055】そして、吸込口本体31は、吸込口27を吸込口体16の前後から挟み込むように、一対の回転清掃部材28を備えている。【0056】電動機29および動力伝達機構41も、一対あって、それぞれの回転清掃部材28に個別に関連している。一対の電動機29は、吸込口本体31の幅方向における一方の端部に設けられる電動機29と、吸込口本体31の幅方向における他方の端部に設けられる電動機29と、を含んでいる。これら一対の電動機29は、吸込口本体31を左右に二分する中心線から実質的に同じ距離離れた箇所に配置されていることが好ましい。一対の動力伝達機構41は、吸込口本体31の幅方向における一方の端部に設けられる動力伝達機構41と、吸込口本体31の幅方向における他方の端部に設けられる動力伝達機構41と、を含んでいる。これら一対の動力伝達機構41は、吸込口本体31を左右に二分する中心線から実質的に同じ距離離れた箇所に配置されていることが好ましい。【0057】吸込口27よりも前側の回転清掃部材28を、前清掃体28F(第一回転清掃部材)と呼ぶ。前清掃体28Fが収容される清掃体室46を前清掃体室46F(第一回転清掃部材室)と呼ぶ。前清掃体28Fに対応する電動機29を前用電動機29Fと呼び、前清掃体28Fに対応する動力伝達機構41を前用伝達機構41Fと呼ぶ。前用電動機29Fが収容される電動機室51を前用電動機室51Fと呼び、前用伝達機構41Fが収容される機械室52を前用機械室52Fと呼ぶ。【0058】吸込口27よりも後ろ側の回転清掃部材28を、後清掃体28R(第二回転清掃部材)と呼ぶ。後清掃体28Rが収容される清掃体室46を後清掃体室46R(第二回転清掃部材室)と呼ぶ。後清掃体28Rに対応する電動機29を後用電動機29Rと呼び、後清掃体28Rに対応する動力伝達機構41を後用伝達機構41Rと呼ぶ。後用電動機29Rが収容される電動機室51を後用電動機室51Rと呼び、後用伝達機構41Rが収容される機械室52を後用機械室52Rと呼ぶ。【0059】つまり、吸込口体16は、吸込口27から吸込室45へと連接する吸込流路34を間に挟んで区画される進行方向前方の前清掃体室46F(第一回転清掃部材室)および進行方向後方の後清掃体室46R(第二回転清掃部材室)を含む少なくとも2つの清掃体室46を備えている。また、吸込流路34は、電動送風機18から吸込口27へ至る吸込風路の一部である。さらに、吸込流路34は、被掃除面に対向して吸込口体16の底面に開口された吸込開口16aから吸込室45へと連接する主風路34aを有している。【0060】また、吸込口体16は、前清掃体室46Fに配置されて吸込口体16に回転可能に支持される前清掃体28F(第一回転清掃部材)、および後清掃体室46Rに配置されて吸込口体16に回転可能に支持される後清掃体28R(第二回転清掃部材)を含み、それぞれの清掃体室46に配置される少なくとも2つの回転清掃部材28を備えている。これら前清掃体28Fおよび後清掃体28Rは、主風路34aを間に挟んで配置されている。【0061】さらに、吸込口体16は、電動送風機18から吸込口27へ至る吸込風路のうち、吸込室45内の左右両側部に塵埃センサー37を備えている。塵埃センサー37は、掃除の状態として、吸込口27から吸引した含塵空気に含まれる塵埃量を検知する。なお、塵埃センサー37の配置は、吸込口体16、延長管15、および掃除機本体1のいずれでも良い。【0062】前清掃体室46F、吸込口27、後清掃体室46Rは、吸込口体16の進行方向へ並んでいる。換言すると、前清掃体28F、吸込口27、後清掃体28Rは、吸込口体16の進行方向へ並んでいる。前清掃体28F、吸込口27、後清掃体28Rは、吸込口体16の前側から後ろ側へ並んでいる。さらに、前清掃体28F、風路狭窄体49、後清掃体28Rは、吸込口体16の進行方向へ並んでいる。前清掃体室46F、吸込口27、後清掃体室46Rは、実質的に同じ幅寸法を有している。なお、「吸込口体16が移動する過程で、吸込口27の前方に位置する回転清掃部材28」とは、吸込口体16が前進する過程では前清掃体28Fであり、吸込口体16が後退する過程では後清掃体28Rである。また、「吸込口体16が移動する過程で、吸込口27の後方に位置する回転清掃部材28」とは、吸込口体16が前進する過程では後清掃体28Rであり、吸込口体16が後退する過程では前清掃体28Fである。【0063】電動機29は、吸込口本体31が被掃除面fに配置された状態で、被掃除面fの塵埃を吸込口27へ塵埃を掃き集める方向へ回転清掃部材28を回転させる。つまり、前用電動機29Fは、吸込口体16の前進を補助する方向Rfへ前清掃体28Fを回転させ、後用電動機29Rは、掃除の状態に応じて吸込口体16の前進を補助する方向Rfまたは吸込口体16の後退を補助する方向Rrへ後清掃体28Rを回転させる。なお、後用電動機29Rは、掃除の状態に応じて後清掃体28Rを回転させることなく吸込口体16の前進または後退に従動させるようにしてもよい。そして、詳細は後述するが、このような電動機29による前清掃体28Fおよび後清掃体28Rの回転は、吸込口体制御部42によって制御される。【0064】透過壁47は、それぞれの清掃体室46の一部を区画し、かつそれぞれの回転清掃部材28の外周面の少なくとも一部を目視可能に覆っている。そのため、吸込口本体31は、透過壁47によって塞がれる少なくとも1つの窓部55を有している。この窓部55は、それぞれの清掃体室46に設けられていても良いし、隣り合う複数の清掃体室46に跨がって設けられていても良い。本実施形態に係る窓部55は、前清掃体28Fを目視可能なように上ケース36に設けられる前清掃体窓55Fと、後清掃体28Rを目視可能なように下ケース35に設けられる後清掃体窓55Rと、を含んでいる。【0065】前清掃体窓55Fは、前清掃体28Fの上方に位置し、かつ前清掃体28Fの全長に渡って開いている。【0066】後清掃体窓55Rは、後清掃体室46Rの上方を経て接続管32に至る吸込室45を避けるため、後清掃体28Rの上方に位置し、かつ後清掃体28Rの左右2箇所に分断されて開いている。つまり、後清掃体窓55Rは、後清掃体28Rの回転中心線に沿う方向へ分割された複数の分割窓55RL、55RRを含んでいる。【0067】そして、透過壁47は、前清掃体窓55Fを塞いで前清掃体窓55Fを目視可能に覆う第一透過壁47Aと、後清掃体窓55Rを塞いで後清掃体窓55Rを目視可能に覆う第二透過壁47Bと、を含んでいる。また、第二透過壁47Bは、後清掃体28Rの回転中心線に沿う方向へ分割されていても良い。つまり、第二透過壁47Bは、後清掃体28Rの回転中心線に沿う方向へ分割された複数の分割透過壁47BL、47BRを含んでいても良い。換言すると、少なくとも1つの透過壁47は、少なくとも1つの回転清掃部材28の回転中心線に沿う方向へ分割された複数の分割透過壁47BL、47BRを含んでいる。【0068】第一透過壁47Aは、上ケース36に固定されている。第一透過壁47Aは、吸込口本体31が被掃除面fに配置された状態で、前清掃体28Fの被掃除面fから最も離れた部位、つまり頂部28Faから前清掃体28Fの回転方向Rfへ沿って延びている。第二透過壁47Bは、下ケース35に固定されている。第二透過壁47Bは、吸込口本体31が被掃除面fに配置された状態で、後清掃体28Rの被掃除面fから最も離れた部位、つまり頂部28Raから後清掃体28Rの回転方向Rrへ沿って延びている。換言すると、透過壁47は、吸込口本体31が被掃除面fに配置された状態で、対応する回転清掃部材28の被掃除面fから最も離れた部位28Fa、28Raから回転清掃部材28の回転方向へ沿って延びている。【0069】第一透過壁47Aは、前清掃体28Fの上方に覆い被さり、かつ前清掃体室46Fの前側の開口縁(吸込口27から最も遠い開口縁)を画定している。そして、第一透過壁47Aは、吸込口本体31の外殻の一部を兼ねる透過部材56である。つまり、下ケース35、上ケース36、および透過部材56は、協働して吸込口本体31の外殻を担っている。透過部材56は、第一透過壁47Aに加えて第二透過壁47Bを一体化したものであっても良い。換言すると、透過部材56は、複数の透過壁47の全部、または一部であって良い。【0070】透過部材56は、上ケース36に覆い被さって後清掃体室46Rの上方を跨ぎ、後清掃体窓55Rより後方で下ケース35に接続されている。つまり、透過部材56は、第二透過壁47Bと協働して後清掃体窓55Rを二重に覆っている。透過部材56は、透明または半透明な樹脂の成型品または成形品である。【0071】吸込口27は、前清掃体室46Fと後清掃体室46Rとの間に配置されている。換言すると、吸込口27は、前清掃体28Fと後清掃体28Rとの間に配置されている。吸込口27は、前清掃体28Fおよび後清掃体28Rに遮られることなく、被掃除面fを臨み、被掃除面fを直視している。【0072】吸込室45は、後清掃体室46Rに覆い被さるように下ケース35に沿って吸込口本体31の後方へ湾曲し、接続管32に繋がっている。吸込室45と接続管32との間には中継管57が設けられている。中継管57は、接続管32を支持する基部の役割を担っている。中継管57は、風路カバー48に一体成形されている。【0073】前清掃体室46Fは、上ケース36、下ケース35、透過壁47の第一透過壁47A、および風路狭窄体49によって区画されている。換言すると、上ケース36、下ケース35、透過壁47の第一透過壁47A、および風路狭窄体49は、協働して前清掃体室46Fを区画している。前清掃体室46Fは、第一透過壁47Aを通じて吸込口本体31の外側から目視できる。【0074】後清掃体室46Rは、下ケース35、透過壁47の第二透過壁47B、および風路狭窄体49によって区画されている。換言すると、下ケース35、透過壁47の第二透過壁47B、および風路狭窄体49は、協働して後清掃体室46Rを区画している。後清掃体室46Rは、第二透過壁47Bを通じて吸込口本体31の外側から目視できる。【0075】機械室52は、吸込口本体31の左右それぞれの端部であって、前清掃体室46F、吸込口27、および後清掃体室46Rの不存在部分に区画されている。機械室52は、前清掃体28Fの軸端、および後清掃体28Rの軸端を収容している。機械室52の底部には、転50が設けられている。【0076】前用機械室52Fは、吸込口本体31の左側の端部であって、前清掃体室46F、吸込口27、および後清掃体室46Rの不存在部分に区画されている。前用機械室52Fは、前清掃体28Fの軸端、および後清掃体28Rの軸端を収容している。【0077】後用機械室52Rは、吸込口本体31の右側の端部であって、前清掃体室46F、吸込口27、および後清掃体室46Rの不存在部分に区画されている。後用機械室52Rは、前清掃体28Fの軸端、および後清掃体28Rの軸端を収容している。【0078】電動機室51は、平面視において前清掃体室46F、吸込口27、後清掃体室46Rに重なり、制御室53と機械室52との間に配置されている。側面視において、前清掃体28Fの回転中心線、後清掃体28Rの回転中心線、電動機29の回転中心線が、三角形状のそれぞれの頂点に位置している。電動機室51は、前清掃体室46F、および後清掃体室46Rの極力近くに円筒形状の電動機29を収容している。つまり、電動機29の底部は、前清掃体28Fの頂部28Fa、および後清掃体28Rの頂部28Raより下方に配置されている。換言すると、電動機29は、前清掃体28Fの被掃除面fから最も離れた部位28Faと、後清掃体28Rの被掃除面fから最も離れた部位28Raと、を結ぶ線分よりも被掃除面fに近い部位を有して、前清掃体28Fと後清掃体28Rとの間に配置されている。このような電動機29の配置、および電動機室51の構成は、回転清掃部材28の上方に電動機29を配置する場合であっても、吸込口本体31の高さを回転清掃部材28の高さ(直径)と電動機29の高さ(直径)との和より低く抑える。【0079】前用電動機室51Fは、吸込口本体31の左側に配置され、かつ前用機械室52Fに併設されている。【0080】後用電動機室51Rは、吸込口本体31の右側に配置され、かつ後用機械室52Rに併設されている。【0081】なお、前用電動機室51Fと前用機械室52Fとが併設されていれば、前用電動機室51Fおよび前用機械室52Fは、吸込口本体31の右側に配置されていても良い。この場合には、前用伝達機構41Fも、吸込口本体31の右側に配置される。後用電動機室51R、後用機械室52R、および後用伝達機構41Rは、吸込口本体31の左側に配置される。【0082】回転清掃部材28の回転中心線は、吸込口本体31の幅方向に向けられている。回転清掃部材28は、放射状に延びるブラシ毛59を有している。ブラシ毛59は、回転清掃部材28の長手方向に延びる複数条の刷毛であり、かつ回転清掃部材28の周方向に並んでいる。【0083】電動機29は、機械室52内に突出する出力軸29aを備えている。出力軸29aの回転中心線は、回転清掃部材28の回転中心線に実質的に平行している。なお、吸込口体16は、電動機29に代わる回転清掃部材28の駆動源、例えば吸込負圧で吸い込まれる空気によって回転するファンやタービンを備えていても良い。【0084】動力伝達機構41は、電動機29の出力軸29aに固定される主動歯車61と、回転清掃部材28に設けられる従動歯車62と、主動歯車61と従動歯車62とに巻掛けられて電動機29から回転清掃部材28へ駆動力を伝える無端状のベルト63と、を備えている。【0085】吸込口体制御部42は、掃除機本体12から延長管15を介して供給される電力によって電動機29を運転する。【0086】そして、吸込口体制御部42は、各種検知部により掃除の状態の検知結果に基づいて、回転清掃部材28の回転(すなわち、電動機29による前清掃体28Fおよび後清掃体28Rの回転)を制御する。なお、吸込口体制御部42は、前清掃体28Fおよび後清掃体28Rの回転を独立して制御する。また、ここで言う回転とは、回転方向、回転速度、および停止等を含むものとする。【0087】ここで、掃除の状態の検知とは、接触センサー33による吸込口体16周辺の障害物の検知、塵埃センサー37による塵埃量の検知、エンコーダー54による吸込口体16の移動の検知や、不図示の赤外線の反射などを用いた吸込口体16と床面との間の距離による床面接地の検知、または回転清掃部材28の回転の負荷状態(すなわち、電動機29の過負荷状態)もしくは電動送風機18の負荷状態によるフローリングか絨毯か等のような床面の判別等が挙げられる。また、吸込口体16周辺の障害物の検知は、接触センサー33に限らず、赤外線や超音波などによる非接触センサーを用いても良い。【0088】具体的に、吸込口体制御部42は、各種検知部の検知結果が、予め設定された第一条件の場合には、各回転掃除部材28のうちの前清掃体28Fを、前進を補助する正転方向(吸込口体16の前進を補助する方向Rf)または前進を補助する方向Rfとは反対の反転方向(吸込口体16の後退を補助する方向Rr)に回転させ、且つ、各回転掃除部材28のうちの後清掃体28Rを回転させることなく、吸込口体16の前進もしくは後退に従動させる、または、前進を補助する方向Rf、もしくは後退を補助する方向Rrに回転させるように、各回転掃除部材28の回転方向を切り替える。【0089】また、吸込口体制御部42は、各種検知部の検知結果が、予め設定された第二条件の場合には、各回転掃除部材28のうちの前清掃体28Fを、前進を補助する方向Rfまたは後退を補助する方向Rrに回転させ、且つ、各回転掃除部材のうちの後清掃体28Rを、後退を補助する方向Rrまたは前進を補助する方向Rfに回転させるように、各回転掃除部材28の回転方向を切り替える。【0090】各種検知部のうち、塵埃センサー37は、掃除の状態として、吸込口27から吸引した含塵空気に含まれる塵埃量を検知する。そして、この場合、予め設定された第一条件には、検知した塵埃量が予め設定された閾値以下の場合が含まれ、予め設定された第二条件には、検知した塵埃量が予め設定された閾値を超えた場合が含まれる。【0091】このとき、吸込口体制御部42は、塵埃センサー37の検知結果が、第一条件の場合には、前清掃体28Fおよび後清掃体28Rの回転数を同一にするようにしても良い。【0092】吸込口体制御部42は、塵埃センサー37の検知結果が、第二条件の場合には、前清掃体28Fの回転数を後清掃体28Rの回転数より増加させるようにしても良い。【0093】吸込口体制御部42は、塵埃センサー37の検知結果が、第二条件の場合には、塵埃量に応じて後清掃体28Rの回転数を増加させるようにしても良い。【0094】各種検知部のうち、エンコーダー54は、掃除の状態として、吸込口体16の移動を検知する。そして、この場合、第一条件には、吸込口体16の移動を検知した場合が含まれ、第二条件には、吸込口体16の停止を検知した場合が含まれる。【0095】また、エンコーダー54によって、吸込口体16の移動を検知する場合、第一条件には、吸込口体16の進行方向における前後方向(X方向)の移動を検知した場合が含まれ、第二条件には、吸込口体16の進行方向における前後方向に直交する左右方向(Y方向)の移動を検知した場合が含まれる。【0096】各種検知部のうち、接触センサー33は、掃除の状態として、吸込口体16の進行方向における前方の障害物(不図示)を検知する。そして、この場合、第一条件には、障害物を検知しない場合が含まれ、第二条件には、障害物を検知した場合が含まれる。【0097】また、各種検知部のうち、後述するスイッチング素子83は、電動機29の電流値に基づき、回転清掃部材28の回転の負荷状態(すなわち、電動機29の過負荷状態)から、掃除の状態として、被掃除面の種類(すなわち、フローリングまたは絨毯等)を検知する。そして、第一条件には、吸込口体16にとって走行抵抗の大きい被掃除面(例えば、絨毯)を検知した場合が含まれ、第二条件には、吸込口体16にとって走行抵抗の小さい被掃除面(例えば、フローリング)を検知した場合が含まれる。【0098】また、スイッチング素子83によって、電動機29の過負荷状態を検知した場合、第一条件には、検知した負荷が予め設定された閾値を超えた場合が含まれ、第二条件には、検知した負荷が予め設定された閾値以下の場合が含まれる。【0099】なお、各種検知部としては、電動送風機18の電流値に基づく電動送風機18の負荷状態から、掃除の状態として、被掃除面の種類(すなわち、フローリングまたは絨毯等)を検知するようにしても良い。【0100】また、吸込口体制御部42は、前述した各種検知部が検知する掃除の状態として、吸込口27から吸引した含塵空気に含まれる塵埃量の検知結果より他の検知結果を優先することが好ましい。【0101】風路狭窄体49は、吸込室45と清掃体室46とを区画し、吸込室45と清掃体室46とを分断し、かつ吸込口27の縁の一部を画定する隔壁65と、隔壁65の縁から突出して回転清掃部材28に接する除塵突起66と、を備えている。【0102】吸込室45と前清掃体室46Fとを区画する隔壁65を前隔壁65F(第一隔壁)と呼ぶ。前隔壁65Fは、吸込口27の前側の縁を画定している。前隔壁65Fの縁から突出して前清掃体28Fに接する除塵突起66を前突起66F(第一除塵突起)と呼ぶ。【0103】吸込室45と後清掃体室46Rとを区画する隔壁65を後隔壁65R(第二隔壁)と呼ぶ。後隔壁65Rは、吸込口27の後ろ側の縁を画定している。後隔壁65Rの縁から突出して後清掃体28Rに接する除塵突起66を後突起66R(第二除塵突起)と呼ぶ。【0104】吸込室45の内面の一部(ここでは吸込室45の後ろ側の内面、吸込室45の内面の第一残部)は、前隔壁65Fに対向し、かつ前隔壁65Fに向かって凸の円弧形状の湾曲面68を有している。湾曲面68は、後隔壁65Rの内面、および後隔壁65Rの内面に連なる下ケース35の面を含んでいる。下ケース35は、後清掃体室46Rの一部を区画する、円弧形状の壁を有している。この壁は、実質的に一様な厚みで後清掃体28Rを同心円状に囲み、かつ後隔壁65Rの内面に滑らかに連なっている。【0105】前清掃体28Fの回転によって被掃除面fから掃き上げられる塵埃は、吸込室45の湾曲面68に向かう。そして、湾曲面68は、飛来する塵埃を吸込室45の奥側(下流側)へ円滑に誘導する。【0106】また、吸込室45の内面の一部(ここでは吸込室45の左右それぞれの側方の内面、吸込室45の内面の第二残部)は、隔壁65に連接し、かつ吸込室45の奥側(下流側)へ向かって風路幅を狭める漏斗状の傾斜面71を有している。傾斜面71は、前隔壁65Fおよび後隔壁65Rに連接している。つまり、傾斜面71は、前隔壁65Fと後隔壁65Rとの間に架け渡されている。傾斜面71は、風路狭窄体49の左右に一対ある。左右の傾斜面71は、風路狭窄体49の対応する端部から離れ、中央部に近づくほど吸込室45の奥側へ入り込むよう傾いている。左右の傾斜面71は、合流することなく、離間している。この左右の傾斜面71の隙間は、傾斜面71よりも奥側の吸込室45へ繋がっている。傾斜面71は、吸込口体16の幅方向へ細長く広がった吸込口27から吸い込まれる空気を、接続管32に繋がる吸込室45の奥側へ円滑に案内する。【0107】傾斜面71は、吸込口本体31の縦断面視において、隔壁65に対向する案内面72を含む階段形状を有している。案内面72は、前隔壁65Fに対向している。この階段形状部は、図7のように単段でも良いし、複数段であっても良い。階段形状は、傾斜面71の全幅に達していることが好ましい。各段の底の形状は平面であっても良いし、窪んでいても良い。案内面72は、前隔壁65Fに平行であることが好ましい。案内面72は、前清掃体28Fに掃き上げられた塵埃を捕捉して吸込室45の奥側へ導く。また、案内面72は、途中部分が前清掃体28Fと被掃除面fとの間に挟まり、一方または両方の端部が吸込口27へ向かって浮き上がった糸状の塵埃が、後隔壁65Rを乗り越えて後清掃体28R側へ接近しないよう、糸状の塵埃の端部を吸込室45の奥側へ導く。【0108】除塵突起66は、回転清掃部材28の回転軌跡の内側に入り込んでいる。除塵突起66は、回転清掃部材28の回転にともなって回転清掃部材28のブラシ毛59を弾く。このとき、除塵突起66は、回転清掃部材28に付着して清掃体室46に進入しようとする糸状の塵埃をブラシ毛59から弾き飛ばして回転清掃部材28から離脱させる。回転清掃部材28から離脱した糸状の塵埃は、吸込口27へ容易に吸い込まれる。つまり、除塵突起66は、回転清掃部材28に付着した糸状の塵埃が清掃体室46へ進入することを阻止できる。【0109】除塵突起66は、隔壁65の全幅に渡って設けられていることが好ましい。除塵突起66は、回転清掃部材28のブラシ毛59を撓ませることができれば良い。そのため、除塵突起66の形状は、図5および図6のように櫛形状であっても良いし、突出長さが全幅に渡って一様な板状であっても良い。除塵突起66が接触することによって回転清掃部材28の回転抵抗が増すため、除塵突起66の形状は、電動機29の出力に応じて、適宜に設定される。【0110】吸込口体16の接地面を基準面とすると、前突起66Fは、基準面に実質的に平行している。後突起66Rは、基準面から遠ざかる方向へ傾いて突出している。なお、前清掃体28Fと後清掃体28Rとの間に主風路34aが配置される構成であれば、これら前清掃体28Fと後清掃体28Rとによって塵埃が主風路34aへと導かれるため、隔壁65(前隔壁65Fおよび後隔壁65R)は設けなくても良い。【0111】一般に、使用者は、吸込口体16を前進させて吸込口体16を未掃除の被掃除面fへ進入させる。このとき、被掃除面f上の糸状の塵埃は、吸込口体16の前方から後方へ移動する。発明者は、前突起66Fを基準面に対して実質的に平行させる一方、後突起66Rを基準面から遠ざかる方向へ傾けることで、糸状の塵埃が前清掃体室46Fおよび後清掃体室46Rの両方に進入しにくくなることを見いだした。【0112】また、後隔壁65Rは、吸込室45と後清掃体室46Rとを繋ぐ孔73を有している。孔73は、左右の傾斜面71に挟まれる範囲に配置されている。孔73は、複数あっても良い。孔73は、後清掃体室46R内に入り込んだ塵埃が後清掃体室46R内に残留しないよう、吸込室45へ排出する。【0113】なお、前清掃体室46Fに入り込んだ塵埃は、前清掃体28Fの回転にともなって吸込口体16の前方へ排出される。つまり、前清掃体室46Fに入り込んだ塵埃は、後清掃体室46Rに入り込んだ塵埃よりも吸込口体16の前進中に吸込口27へ吸い込まれる機会が多い。そのため、前隔壁65Fは、後隔壁65Rのように孔73を有していなくとも良い。【0114】また、仮に、清掃体室46に塵埃が入り込んだ場合には、使用者は、透過壁47を通じてそのことを目視することができる。つまり、使用者は、第一透過壁47Aを通じて前清掃体室46Fに塵埃が入り込んでいるか否かを目視することが可能であって、第二透過壁47Bを通じて後清掃体室46Rに塵埃が入り込んでいるか否かを目視することが可能である。【0115】後清掃体室46Rの開口縁部の一部であって、後突起66Rに対向する箇所には、後清掃体28Rに向かって鋭角な縦断面形状を有する突出部75が設けられている。突出部75は、後清掃体室46Rの開口縁部の後ろ側の部分に設けられている。吸込口体16を絨毯のように柔らかい被掃除面fで使用する場合には、吸込口本体31は、被掃除面fに沈み込む。このような場合に、突出部75は、ブルドーザーのブレードのように被掃除面fを掻き起こして、絨毯に入り込んだ塵埃を掻き出す。【0116】突出部75は、後清掃体室46Rの全幅に渡っていることが好ましい。また、突出部75は、吸込口体16をフローリングのような堅い被掃除面fで使用する場合には、被掃除面fに接しない範囲で吸込口本体31の下方へ向かって吸込口本体31の底面よりも突出していても良い。【0117】なお、吸込口体16は、吸込口27を間に挟む前清掃体28Fおよび後清掃体28Rを含む3つ以上の回転清掃部材28を備えていても良い。つまり、吸込口体16は、吸込室45の外側に区画されて吸込口27を間に挟む前清掃体室46Fおよび後清掃体室46Rを含む3つ以上の清掃体室46と、前清掃体28Fおよび後清掃体28Rを含み、それぞれの清掃体室46に配置される3つ以上の回転清掃部材28と、を備えていても良い。この場合には、清掃体室46および回転清掃部材28とは、同数設けられていることが好ましい。電動機29、電動機室51、動力伝達機構41、および機械室52は、清掃体室46および回転清掃部材28と同数設けられていても良いし、複数の回転清掃部材28を同時に駆動可能な限りにおいて清掃体室46および回転清掃部材28よりも少数であっても良い。例えば、1つの電動機29の駆動力を動力伝達機構41で分配して複数の回転清掃部材28を同時に駆動させても良い。【0118】また、吸込口体16は、前清掃体28Fを目視可能に覆う第一透過壁47A、および後清掃体28Rを目視可能に覆う第二透過壁47Bを含む3つ以上の透過壁47を備えていても良い。この場合には、それぞれの透過壁47は、それぞれの清掃体室46に設けられる。透過部材56は、3つ以上の透過壁47の全部、または一部であって良い。【0119】図9は、本発明の実施形態に係る吸込口体の制御ブロック図である。【0120】図9に示すように、本実施形態に係る吸込口体16は、掃除機本体12に装着された二次電池13から供給される電力で、電動機29を駆動させる。【0121】そして、吸込口体16の吸込口体制御部42は、二次電池13から供給される電力を降圧して制御用の電源を出力する制御用電源生成部81と、二次電池13からそれぞれの電動機29へ駆動電力を供給する電路82を開閉する複数のスイッチング素子83と、制御用電源生成部81から供給される電源でパルス幅変調(Pulse Width Modulation、PWM)制御用の基準電圧を生成する基準電圧生成部85と、それぞれのスイッチング素子83を個別に開閉制御する複数のPWM制御部86と、を備えている。【0122】スイッチング素子83は、双方向サイリスタ(Triode AC Switch、TRIAC)や逆阻止3端子サイリスタ(Silicon Controlled Rectifier、SCR)、MOSFET(Metal-Oxide-Semiconductor Field-Effect Transistor)などの素子である。スイッチング素子83は、PWM制御部86に接続されるゲート83aを備えている。スイッチング素子83は、ゲート電流またはゲート電圧の変化に応じて電動機29の入力(駆動電流)を変える。【0123】吸込口体制御部42は、複数の電動機29の少なくとも1つが、過負荷状態になった場合には、その過負荷状態の電動機29を停止させ、他の非過負荷状態の電動機29の運転を継続させる。つまり、それぞれのPWM制御部86は、対応する電動機29に流れる電流値を、例えば電流センサ(図示省略)で検知し、この電流値が過大になった場合には、電動機29を停止させる。【0124】なお、吸込口体制御部42は、複数の電動機29の少なくとも1つが、過負荷状態になった場合には、全ての電動機29を停止させるものであっても良い。この場合には、PWM制御部86は、1つあれば良い。【0125】以上のように、本実施形態に係る電気掃除機1は、掃除の状態を検知する各種検知部と、それら検知部の検知結果に基づき、各回転掃除部材28(前清掃体28Fおよび後清掃体28R)の回転を制御する吸込口体制御部42と、を備えている。そして、吸込口体制御部42は、検知部の検知結果に基づいて、前清掃体28Fおよび後清掃体28Rの回転を制御する。具体的に、吸込口体制御部42は、各種検知部の検知結果が、予め設定された第一条件の場合には、各回転掃除部材28のうちの前清掃体28Fを、前進を補助する正転方向(吸込口体16の前進を補助する方向Rf)または前進を補助する方向Rfとは反対の反転方向(吸込口体16の後退を補助する方向Rr)に回転させ、且つ、各回転掃除部材28のうちの後清掃体28Rを回転させることなく、吸込口体16の前進もしくは後退に従動させる、または、前進を補助する方向Rf、もしくは後退を補助する方向Rrに回転させるように、各回転掃除部材28の回転方向を切り替える。また、吸込口体制御部42は、各種検知部の検知結果が、予め設定された第二条件の場合には、各回転掃除部材28のうちの前清掃体28Fを、前進を補助する方向Rfまたは後退を補助する方向Rrに回転させ、且つ、各回転掃除部材のうちの後清掃体28Rを、後退を補助する方向Rrまたは前進を補助する方向Rfに回転させるように、各回転掃除部材28の回転方向を切り替える。【0126】そのため、電気掃除機1は、掃除の状態に対応して回転掃除部材28の回転を使用者の操作を補助する方向に切り替えることで軽い操作力で掃除できる。また、塵埃量の多い場合には、回転掃除部材28の回転を、塵埃を掻き上げる力を増加させる方向に切り替えることで集塵性を向上できる。すなわち、吸引力(電動送風機18の入力)を上げなくても塵埃の収集を向上できる。これにより、吸込口体16の進行の補助と塵埃収集との相反するものを最適化できる。つまり、電気掃除機1は、床面から塵埃を掻き出す効率は維持しつつ、吸込口体16の床面への張り付きを抑制可能とすることで、吸込口体16の進行が困難となるのを回避して操作性の向上を図ることができる。かくして、電気掃除機1は、吸込口体16の操作性を向上させることで、掃除作業において使用者の疲労感が増すなどの使用者の負担を軽減でき、使い勝手を向上できる。【0127】また、吸込口体制御部42は、各種検知部により掃除の状態の検知結果に基づいて、回転清掃部材28の回転、すなわち、電動機29による前清掃体28Fおよび後清掃体28Rの回転を独立して制御する。これにより、吸込口体16の進行の補助と塵埃収集との相反するものの最適化が容易となる。【0128】掃除の状態の検知としては、接触センサー33による吸込口体16周辺の障害物の検知、塵埃センサー37による塵埃量の検知、エンコーダー54による吸込口体16の移動の検知や、不図示の赤外線の反射などを用いた吸込口体16と床面との間の距離による床面接地の検知、または回転清掃部材28の回転の負荷状態(すなわち、電動機29の過負荷状態)もしくは電動送風機18の負荷状態によるフローリングか絨毯か等のような床面の判別等が含まれる。【0129】各種検知部のうち、塵埃センサー37は、掃除の状態として、吸込口27から吸引した含塵空気に含まれる塵埃量を検知する。そして、この場合、予め設定された第一条件には、検知した塵埃量が予め設定された閾値以下の場合が含まれ、予め設定された第二条件には、検知した塵埃量が予め設定された閾値を超えた場合が含まれる。このように、吸い込まれる塵埃量が多い場合には、走行補助を減らし走行速度を低下すると共に掻き上げを強くすることで、吸込口体16の進行の補助と塵埃収集との相反するものを最適化できる。【0130】また、吸込口体制御部42は、塵埃センサー37の検知結果が、第一条件の場合には、前清掃体28Fおよび後清掃体28Rの回転数を同一にするようにしても良い。これにより、電流の出力を必要最低限に抑えて省エネルギー化を図ることができる。【0131】さらに、吸込口体制御部42は、塵埃センサー37の検知結果が、第二条件の場合には、前清掃体28Fの回転数を後清掃体28Rの回転数より増加させるようにしても良い。これにより、集塵力は維持しつつ、吸込口体16の進行を補助するアシスト性を向上できる。【0132】さらに、吸込口体制御部42は、塵埃センサー37の検知結果が、第二条件の場合には、塵埃量に応じて後清掃体28Rの回転数を増加させるようにしても良い。これにより、塵埃量に応じて集塵力を向上できる。とりわけ、前清掃体28Fの回転数の増加と組み合わせた場合、後清掃体28Rの回転数の増加により集塵性を上げつつ、前清掃体28Fの回転を高速にして前進を補助する補助機能を確保できる。【0133】また、掃除の状態として、エンコーダー54により吸込口体16の移動を検知し、第一条件として、吸込口体16の移動を検知した場合を含み、第二条件として、吸込口体16の停止を検知した場合を含むことが好ましい。これにより、吸込口体16を移動させる場合は当該移動を補助し、吸込口体16を停止させる場合には、吸込口体16の進行の補助を止めると共に、停止直前の進行方向と同方向にも逆方向にも瞬時に切り替えが可能となり、集塵力を向上することで、吸込口体16の進行の補助と塵埃収集との相反するものを最適化できる。【0134】また、エンコーダー54によって、吸込口体16の移動を検知する場合、第一条件には、吸込口体16の進行方向における前後方向(X方向)の移動を検知した場合が含まれ、第二条件には、吸込口体16の進行方向における前後方向に直交する左右方向(Y方向)の移動を検知した場合が含まれる。これにより、吸込口体16の進行方向における前後方向(X方向)の移動を補助しつつ、吸込口体16の左右方向(Y方向)への移動の場合には前後方向へのズレを防止しつつ、床面に張り付くことなく容易に左右方向に移動させることができる。【0135】さらに、接触センサー33によって、掃除の状態として、吸込口体16の進行方向における前方の障害物(不図示)を検知する場合、第一条件には、障害物を検知しない場合が含まれ、第二条件には、障害物を検知した場合が含まれる。よって、吸込口体16の進行方向に障害物が無い場合には進行を補助でき、障害物を検知した場合、例えば、障害物として壁を検知した場合には、壁際の塵埃を掻き出すことで集塵力を向上し、スムーズに次の動作である後退のアシストに切り替えることができる。【0136】また、スイッチング素子83によって、電動機29の電流値に基づき、掃除の状態として、被掃除面の種類(すなわち、フローリングまたは絨毯等)を検知する場合、第一条件には、検知した負荷が予め設定された閾値を超えた場合、すなわち、吸込口体16にとって走行抵抗の大きい被掃除面(例えば、絨毯)を検知した場合が含まれる。さらに、第二条件には、検知した負荷が予め設定された閾値以下の場合、すなわち、吸込口体16にとって走行抵抗の小さい被掃除面(例えば、フローリング)を検知した場合が含まれる。これにより、床面の状況に応じて吸込口体16の進行の補助と塵埃収集との相反するものを最適化できる。被掃除面が毛足の長い絨毯や、リノリュームなどの張り付き易い素材の場合は吸込口体16の移動が容易となり、フローリングなどの場合には床面(被掃除面)の磨き効果が向上する。【0137】なお、各種検知部としては、電動送風機18の電流値に基づく電動送風機18の負荷状態から、掃除の状態として、被掃除面の種類(すなわち、フローリングまたは絨毯等)を検知するようにしても良い。【0138】また、吸込口体制御部42は、前述した各種検知部が検知する掃除の状態として、吸込口27から吸引した含塵空気に含まれる塵埃量の検知結果より他の検知結果を優先することが好ましい。これにより、塵埃量の多寡に拘わらず、吸込口体16の次の移動を優先できる。【0139】また、本実施形態に係る電気掃除機1は、吸込口本体31が被掃除面fに配置された状態で、被掃除面fの塵埃を吸込口27へ向けて掃き集める方向へ回転する複数の回転清掃部材28を備えている。そのため、吸込口体16および電気掃除機1は、吸込口体16が移動する過程で、吸込口27の前方に位置する回転清掃部材28、および吸込口27の後方に位置する回転清掃部材28で、被掃除面fの塵埃をより確実に捕捉できる。【0140】また、本実施形態に係る電気掃除機1は、前清掃体28Fの被掃除面fから最も離れた部位28Faと、後清掃体28Rの被掃除面fから最も離れた部位Fbと、を結ぶ線分よりも被掃除面fに近い部位を有して、前清掃体28Fと後清掃体28Rとの間に配置される電動機29を備えている。そのため、吸込口体16および電気掃除機1は、吸込口本体31の高さを極力小さくできる。また、吸込口体16および電気掃除機1は、吸込口体16の稜線を下げ、電気掃除機1の使用者の視線に対して透過壁47が隠れることを防ぎ、回転清掃部材28の視認性を向上させる。【0141】さらに、本実施形態に係る吸込口体16および電気掃除機1は、複数の電動機29の少なくとも1つが、過負荷状態になった場合には、過負荷状態の電動機29のみを停止させても良いし、複数の電動機29の全てを停止させても良い。いずれの場合であっても、吸込口体16および電気掃除機1は、透過壁47によって複数の回転清掃部材28の動作状況が正常か否かを使用者に容易に視認させることができる。【0142】したがって、本実施形態に係る吸込口体16および電気掃除機1によれば、回転清掃部材28への糸状の塵埃の巻き付きを抑制可能であり、かつ仮に糸状の塵埃が回転清掃部材28に巻き付いた場合には、そのことを容易に知ることができる。【0143】本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれると共に、特許請求の範囲に記載された発明とその均等の範囲に含まれる。【符号の説明】
【0144】1…電気掃除機、11…把手、12…掃除機本体、13…二次電池、15…延長管、16…吸込口体、16a…吸込開口、17…本体ケース、17a…前半部、17b…後半部、18…電動送風機、19…塵埃分離集塵部、21…本体制御部、23…本体接続口、26…入力部、26a…運転開始スイッチ、26b…運転停止スイッチ、26c…ブラシスイッチ、27…吸込口、28…回転清掃部材、28F…前清掃体、28Fa…前清掃体の頂部、28R…後清掃体、28Ra…後清掃体の頂部、29…電動機、29F…前用電動機、29R…後用電動機、29a…出力軸、31…吸込口本体、31a…底面、32…接続管、33…接触センサー、34…吸込流路、34a…主風路、35…下ケース、36…上ケース、37…塵埃センサー、38…回転接続管、39…揺動接続管、41…動力伝達機構、41F…前用伝達機構、41R…後用伝達機構、42…吸込口体制御部、45…吸込室、46…清掃体室、46F…前清掃体室、46R…後清掃体室、47…透過壁、47A…第一透過壁、47B…第二透過壁、47BL、47BR…分割透過壁、48…風路カバー、49…風路狭窄体、50…転、51…電動機室、51F…前用電動機室、51R…後用電動機室、52…機械室、52F…前用機械室、52R…後用機械室、53…制御室、54…エンコーダー、55…窓部、55F…前清掃体窓、55R…後清掃体窓、55RL、55RR…分割窓、56…透過部材、57…中継管、59…ブラシ毛、61…主動歯車、62…従動歯車、63…ベルト、65…隔壁、65F…前隔壁、65R…後隔壁、66…除塵突起、66F…前突起、66R…後突起、68…湾曲面、71…傾斜面、72…案内面、73…孔、75…突出部、81…制御用電源生成部、82…電路、83…スイッチング素子、83a…ゲート、85…基準電圧生成部、86…PWM制御部。


コメント